
Die RC Modelle der Familie Frauenstein
wieder Betriebsbereit
seit 2010

Collie am Wind nach Funktionserweiterung an der Fock 2022
Baujahr: 1981/82
Collie (Baukastenmodell von Graupner)
Das Baukastensegelboot Collie von Graupner war unser aller erstes RC Modell und hat als Weihnachtsgeschenk das Hobby damals ins Rollen gebracht. Im Lauf der Achtziger wurde dieses Segelboot weiter verbessert. Wir haben es, damit es mit böigem Wind besser umgehen kann mit einem verlängerten und beschwerten Kiel versehen. Zusätzlich wurde der Rumpf mit PU-Schaum gefüllt, um es unsinkbar zu machen. Als Vorbereitung zum Bau der TRISTEIN gönnten wir der Collie eine Segelwinde für das Großschot mit selbstentwickelter Elektronik.
Instandsetzung Collie: Status 09/2010
Akkutausch
Die Collie war technisch noch in sehr gutem Zustand. Es mussten nur ein paar Zierteile an der Kajüte wieder verklebt und der alte 4,8 V Ni-Cd Empfängerakku gegen einen neuen NiMH getauscht werden. Bei der ersten Probefahrt brach allerdings der Lümmelbeschlag (aus Plastik), welchen ich aus Ermangelung eines Ersatzteiles noch nicht ersetzen konnte. Das ist aber nicht so tragisch, da denn Jungs das Segeln noch zu träge und kompliziert ist.
Instandsetzung Collie: Status 12/2011
Reparatur des Lümmelbeschlages
Da die zwei im Zubehör verfügbaren Lümmelbeschläge nicht für die Collie geeignet sind, bin ich dem alten Plastikbeschlag mit Drehmel, Nagel und Hitze zu Leibe gerückt und habe ihn wieder zusammen gefriemelt. Mal sehen, wie lange das gut geht.
Instandsetzung Collie: Status 06/2020
Verbesserung Ruderanlage und neuer Verklicker
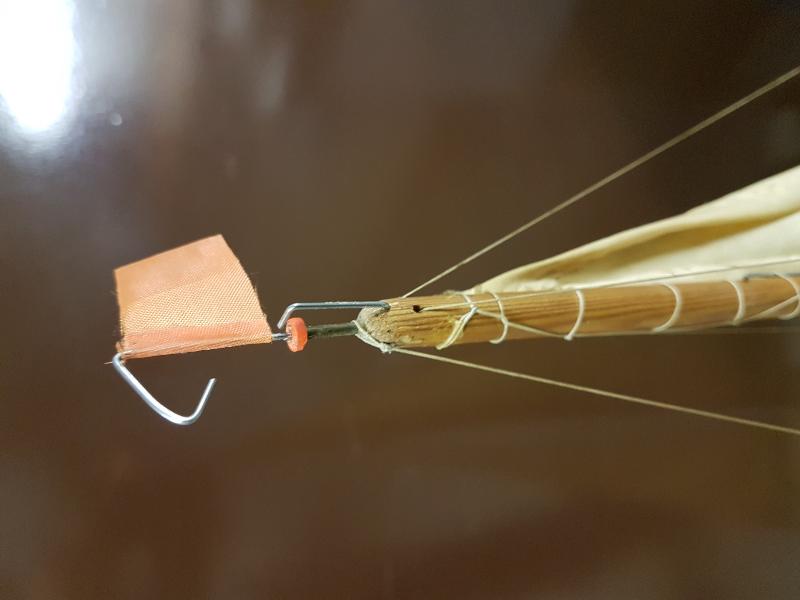
Der Lümmelbeschlag hält immer noch. Aber der verbaute No-Name Ruderservo zeigte zunehmend Altersschwäche. Daher wurde erstmal auf 6 Volt Spannungsversorgung für den RC-Empfänger umgerüstet. Da dies nicht den gewünschten Erfolg brachte wurde der Ruderservo gegen einen RS20 von Robbe aus den 90igern getauscht. Auch der verlorengegangene Verklicker (Windanzeiger) wurde so neu konstruiert, dass er nicht mehr verloren gehen kann.
{kind=link}
Funktionserweiterung Collie: Status 10/2022
Funktionserweiterung zur Segelverstellung der Fock
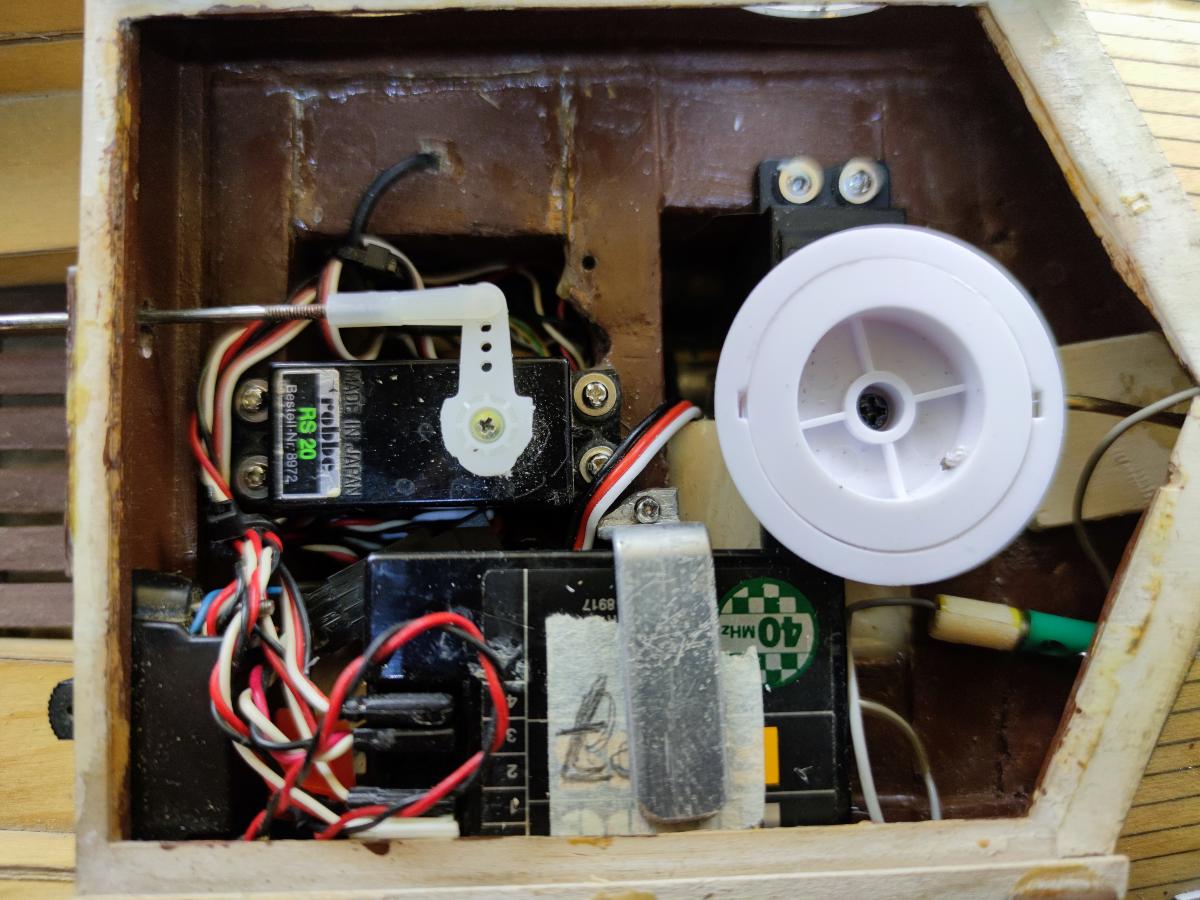
Bei der Collie ist ja eine Segelwinde im Heckkasten verbaut, die nur die Großschot ansteuert. Dies führt natürlich zu einem recht unausgeglichenen Fahrverhalten, da das fest eingestellte Focksegel meistens nicht zur Bewegungs- zu Windrichtung passt. Daher muss meistens gegensteuert werden. Eine zusätzliche Segelwinde für die Fock soll das nun verbessern. Da der Platz in der Kajüte mit Ruderservo, Akku und Empfänger schon gut belegt war und das restliche Boot ausgeschäumt ist waren dafür einige umbauten erforderlich.
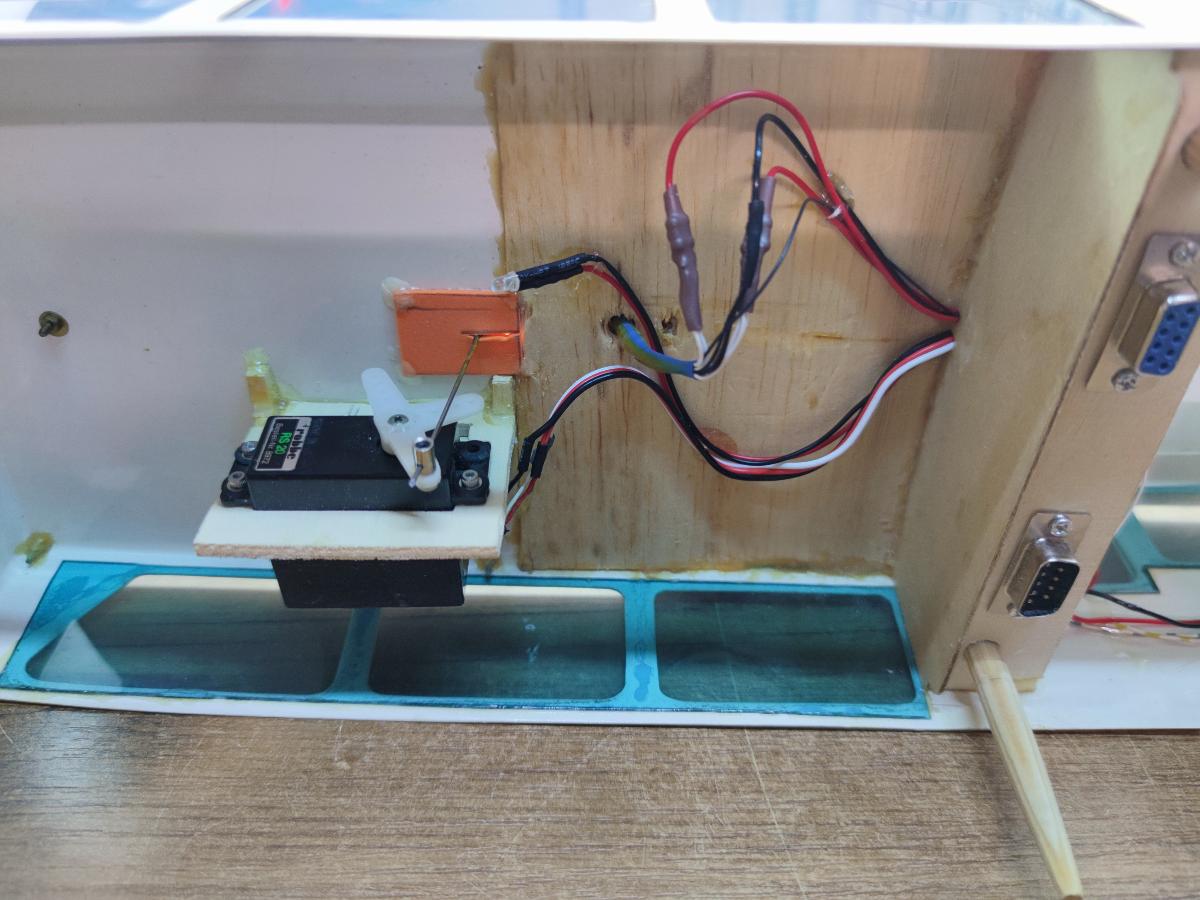
Als erstes wurde dafür die kleine Segelwinde von Krick mit ihren 2 Umdrehungen angeschafft, da sie vom Aussteuerweg am besten zur Fock der Collie passt. Als zweites wurde der Akku tiefer gelegt indem die vorhandene Aussparung nach unten erweitert wurde. Somit kann nun die Winde anstelle des Akkus mittig in der Kajüte verbaut werden. Der Empfänger ist nun seitlich neben dem Ruderservo plaziert.
Der dritte Schritt war handwerklich der schwierigste, da die Fockschot von der Winde ja noch angesteuert werden muss. Hierfür habe ich ein dünnes Messingrohr von der Kajüte unter dem Mast hindurch zur Fock verlegt. Die dafür in das Deck gefräste Nut wird durch den Mastfuß verdeckt. Das letzte Stück wurde als Tunnel knapp unter dem Deck ausgeführt. Das Messingrohr ist daher mehrfach gebogen um den benötigten Verlauf folgen zu können. Damit das Rohr beim biegen durchgängig blieb und so die Fockschot auch wirklich durchläuft habe ich einen passenden Federstahl eingeführt und erst nach dem es gebogen war wieder herrausgezogen.
Nun lassen sich beide Segel separat ansteuern und somit die Balance der Collie im Wind deutlich besser kontrollieren, was bei der Probefahrt zu deutlich weniger Rudernutzung fuührt .
Damit das über die Fehrnsteuerung bequem zu handhaben ist habe ich eine unserer Starion Sender mit zwei paralell verbauten Schiebepotetiometer für Kanal 3 und 4 umgerüstet.
Aus optischen Gründen habe ich noch die wirklich unschöne Ruderansteuerung aus Alu gegen einen Eigenbau aus Holz,Messing und ein bisschen Leder getauscht, der der originalen Pinne aus Plastik deutlich näher kommt.
{kind=link}
{kind=link}
{kind=link}
wieder Betriebsbereit
seit 2015

Stromaufsichtsboot im Dienst
Baujahr: 1982
Bussard (Baukastenmodell von Robbe)
Das Baukastenschiff Bussard von Robbe, das als Geburtstagsgeschenk aufgeschlagen ist, wurde als nächstes Modellbauprojekt angegangen. Dieses Stromaufsichtsboot wurde am Anfang mit zugekauften Elektronikbausätzen für Sonderfunktionen bestückt, um die Mars-Fernbedienung mit 8-Kanälen auszureizen. Außer Fahrtregler und Ruder gab es sowohl eine schaltbare Beleuchtung, als auch ein aktivierbares Radar. Auf akustische Reize wurde auch nicht verzichtet. Im Lauf der Zeit wurden die Sonderfunktionen allerdings durch selbstgebaute Elektronik ersetzt, sodas der mit dem Fahrtregler gekoppelte Dieselgeräuschgenerator sich auf ein Nebelhorn oder eine Sirene umschalten lässt. Schlussendlich wurde auch noch eine nicht ganz bootstypengerechte drehbare und wasserspeiende Löschkanone verbaut.
Instandsetzung Bussard: Status 11/2013
Funktionsprüfung
Die erste Sichtung und Funktionsprüfung zeigte außer den obligatorisch defekten Akkus doch mehr Probleme als beim Schlumpfo und bei der Collie. Dieselgeräusch, Servos, Beleuchtung, Wasserpumpe und Fahrtregler sind funktionsfähig, aber leider hatte ich massive RC-Störungen bei aktivem Antriebsmotor. Da die Funktionsprüfung mit einem Labornetzteil mit 6 V sowohl für den Antrieb und den RC-Pfad als auch für die Zusatzfunktionen (6 V + 6 V) zusammengestöpselt war ist noch nicht klar, woher die Störungen kommen. Hier steht eine erneute Prüfung mit Akkus an (6 V Blei und 12 V NiMH) wenn diese verfügbar sind. Ansonsten fehlen auch noch der Ständer und einige Anbauteile, die ich hoffentlich über Weihnachten noch angeliefert bekomme.
Instandsetzung Bussard: Status 04/2015
Akkutausch und Reparaturen
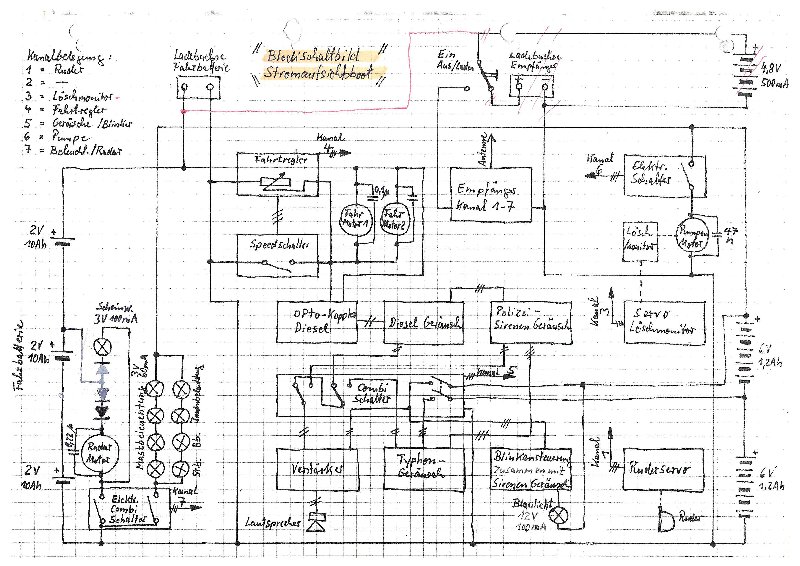
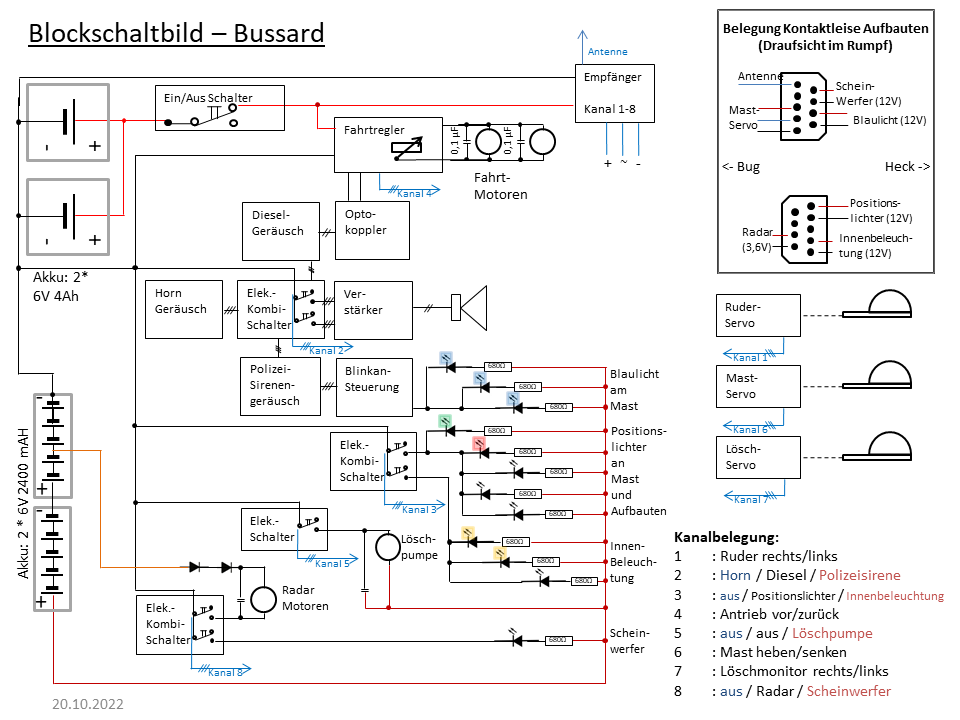
Der Ständer wurde zwar Ende 2013 in Teilen geliefert, aber ansonsten ließen sich weder die vermissten Anbauteile noch ein Blockschaltbild auftreiben. Da gut Ding bekanntlich Weile braucht wurde der Bussard 2014 erst mal nur auf den geflickten Ständer gesetzt und sich um andere Projekte gekümmert. Nun in 2015 ist ein Blockschaltbild und die Empfängerkanalbelegung für die Sonderfunktionen aufgetaucht. Die Bleiakkus (2 * 6V/4 Ah) für Antrieb und RC-Pfad sind verbaut und angeschlossen. Auch die 12 V NiMH sind nun so im Bauch der Bussard verdrahtet, dass die Wasserlinie passt. Beim ersten Einschalten zeigte sich, dass bis auf die Polizeisirene, die nicht mehr auf- und ab-schwellt und der Zusatzscheinwerferglühbirne mit den neuen Akkus gleich alles was Strom braucht störungsfrei funktionierte.
Vor 30 Jahren waren ja 2 V Bleiakkus für den Antrieb verbaut, wovon einer auch den Motor des Radars und den Zusatzscheinwerfer auf dem Kajütendach bediente. Das ging mit den neuen 6 V Pb-Blöcken so nun nicht mehr. Da die Glühbirne des Zusatzscheinwerfers sowieso durchgebrannt war habe ich hier auf eine weiße LED umgerüstet. Daher wurden die Versorgungsspannung für Radar und Zusatzscheinwerfer auf 3,6 V als Abgriff aus dem 12 V Pfad realisiert und mit spannungssenkenden Dioden am Radarmotorpfad ausgeglichen.
Auf der mechanischen Seite hat der Zahn der Zeit das Plastik der Antriebsgelenkwellen versprödet. Diese Standartbauteile wurden noch vor der ersten richtigen Probefahrt außerhalb der Badewanne ersetzt. Auch die Stevenrohre mussten mit Öl auf gefüllt werden. Als nächstes wurde die Fehlerquelle der Polizeisirene gesucht und gefunden. Auch hier war Alterung die Ursache. Da keine passenden Poti im Fundus vorhanden waren habe ich die frequenzbestimmenden Potentiometer durch passende Festwert-Wiederstände ersetzt. Um die fehlenden Anbauteile allerdings kümmere ich mich dann erst nach der erfolgreichen Probefahrt.
{kind=link}
{kind=link}
Instandsetzung Bussard: Status 04/2016
Probefahrt und Schönheitsreparaturen
Im Winter wurden ein neuer Auspuff für das Heck und ein Kaminrohr für das Dach des Bootshauses angefertigt. Auch wurden die verlorengegangenen Teile der Reling durch passend zugeschnittene Drahtstücke ersetzt und zusammen mit den abgefallenen und losen Stücken wieder an ihrem Platz verklebt. Natürlich gab es dann auch noch neue Farbe dazu. Das einzige Thema welches die Bussard am Teich nun noch hat, ist der durch das Alter undicht gewordene Löschmonitor. Da dieser von Graupner nicht mehr angeboten wird, bin ich noch auf der Suche nach Ersatz.
Instandsetzung Bussard: Status 07/2020
Ersatz Löschmonitor
Im Mai dieses Jahres bin ich nun endlich in den Weiten des WWW fündig geworden und konnte einen Graupner Löschmonitor erstehen. Dieser war recht schnell zusammengebaut, angepasst und montiert. Die erste Erprobung am Teich war aber nicht erfolgreich, da die alte KFZ-Wischwasserpumpe nicht mehr recht wollte und auch hier der altersschwache No-Name Servo sein Getriebe zerlegte. Nach einem kleinen Service der Pumpe und dem Tausch des Servos gegen einen aus dem Fundus war Wasser Marsch dann aber wieder möglich.
{kind=link}
Funktionserweiterung Bussard: Status 01/2022
Reparatur und Funktionserweiterung des Beleuchtungsmastes
Bei der letzten Ausfahrt im Herbst 2021 ist eines der Lämpchen am Lichtmast durchgebrannt. Nach fast 30 Jahren ist das auch zu erwarten. Da aber immer 4 Lämpchen mit je 3 Volt in Reihe geschaltet sind, geht damit nun nur noch ein Lämpchen am Lichtmast. Damit hat dieser seinen Namen eigentlich nicht mehr verdient und muss neu ausgerüstet werden. Als Ersatz kommen nun mit Vorwiderstand vorkonfektionierte 3 mm LED zum Einsatz, die direkt an 12 Volt angeschlossen werden können. Um an die Kabelage herran zu kommen, muss der Mast ab und dann geöffnet werden. Dann kann ich auch gleich die Anzahl der Blaulichter, wie beim Original, erhöhen.
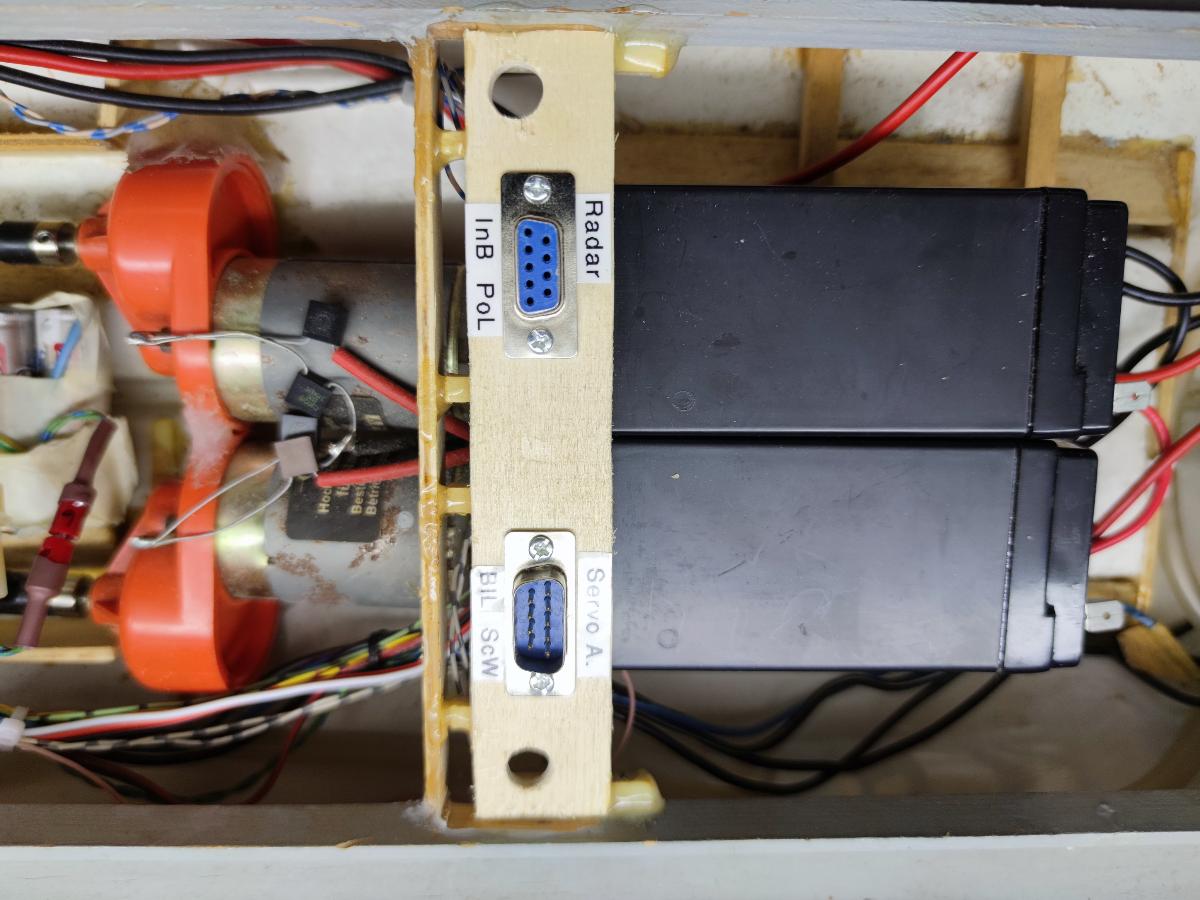
Bei der Onlinerecherche für die Beleuchtung ist mir aufgefallen, das bei der echten Bussard dieser Mast klapbar ist. Da unsere Bussard ja ein Funktionsmodell ist und noch nicht alle RC-Kanäle im Einsatz sind, wird das über den Winter mit Hilfe eines Servos nun klapbar gestalltet. Für die dafür zusätzlich notwendigen 3 Steckverbindungen zwischen Rumpf und Aufbauten kann ich dann auch gleich noch die altehrwürdige Verbindungsleise neu gestalten. Geplant ist, dies mit 2 Sub-D Stecker/Buchsen Kombinationen (9 polig) um zusetzen. Da dann noch Kontakte frei sind kann ich auch noch die Innenbeleuchtung und den Scheinwerfer separat schalten. Wie das neue Blockschaltbild nun zeigt würden so die 8 Kanäle komplett ausgelastet werden.
Nachsatz 09/2022: Im Zuge der Umsetzung musste dann nicht nur die Kontaktleisten mit Halterungen neu gestaltet werden, sondern auch noch im Heck Platz für den grösseren 8-Kanalempfänger und für die zwei zusätzlichen RC-Schalter geschaffen werden. Der Alukühler des Fahrtreglers muste dafür ein par Kühlrippen opfern. Durch Alterung oder Umbaustress erzeugte das Polizeihorn plötzlich nur noch eine Signalfrequenz und musste durch Tausch eines Elkos auch noch instand gesetzt werden. Nachdem diese Hürden alle genommen waren ist das Aufsichtsboot nun wieder vollfunktionstüchtig im Wasser.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
nie wieder
Betriebsbereit

Baujahr: ca. 1982/83
Proppy (Baukastenmodell von Robbe)
Unser Baukastenmodell Proppy von Robbe ist nach diversen Umbauten noch im letzten Jahrtausend von uns gegangen. Es konnte nie geklärt werden, ob es ein fahrrerischer oder ein technischer Fehler war, der zum Totalverlust führte. Klar war aber immer, das der Frontalzusammenstoß mit einer Kaimauer aus Beton bei voll vorraus fatal enden musste. Der Tot und Untergang kam daher schnell, vollumfänglich und alternativlos.
RIP
Instandsetzung:
Nicht möglich
wieder Betriebsbereit
seit 2021

STRAWAP nach technischer Renovierung 2021
Baujahr: 1983
STRAWAP MVF 38
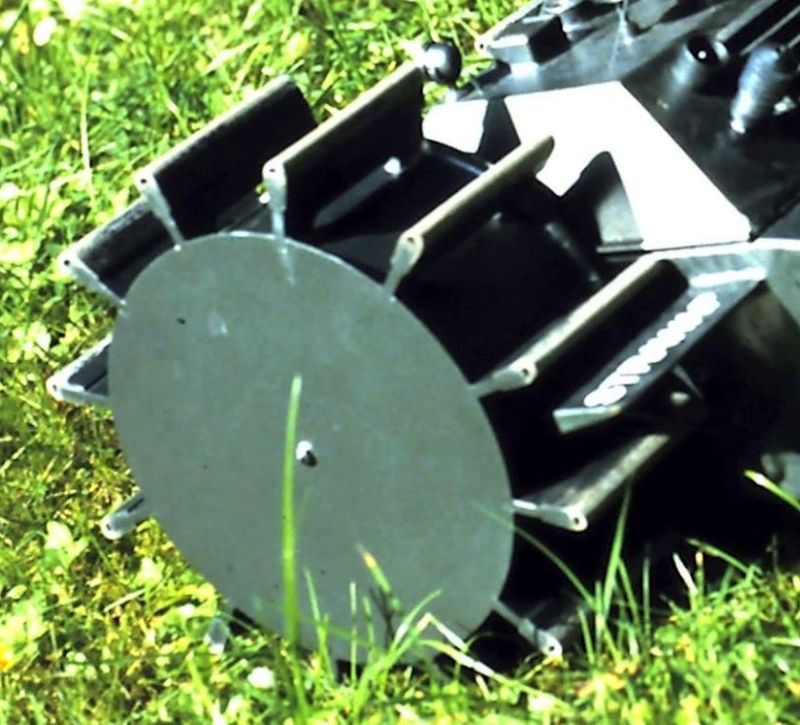
Nach Abschluss des in der SchiffsModell veröffentlichten Baubericht von 1983 sind noch einige Verbesserungen umgesetzt worden. Die Schaufelradblätter wurden aus Plexiglas neu gefertigt und bekamen eine Durchlassöffnung, sodass die Luft beim Wasserbetrieb besser entweichen kann. Somit ist der Antrieb im Wasser effizienter. Auch wurde ein Hohlgummiprofil auf den neuen Schaufelradblättern zur besseren Dämpfung bei Fahrten auf Land vorgesehen. Im Lauf der Zeit wurde auch eine GFK Schicht auf den Rump aufgebracht und eine horizontale Scheibenflosse am Heck montiert um das Unterwasser-Sonar besser zu schützen.
{kind=link}
Instandsetzung STRAWAP: Status 07/2015
Sichtung, Akkutausch und Funktionsprüfung
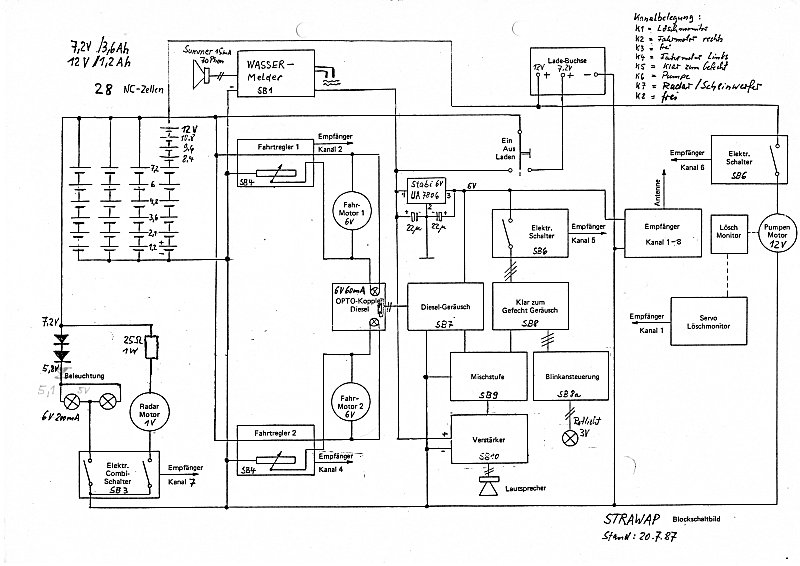
Bei der ersten Sichtung zeigte sich, dass es nicht nur ein paar abgebrochene Anbauteile zu reparieren oder zu ersetzen gibt, sondern auch, dass das Blockschaltbild vom Baubericht nicht mehr wirklich aktuell ist. Anno 1996 hatte der STRAWAP neue 1,2 V 1500 mAh Ni-Cd Sub-C Zellen bekommen, die zu 7,2 V / 3 Ah und 12 V / 1,5 Ah zusammengeschaltet waren. Ich habe mir erst gar nicht die Mühe gemacht diese zu laden, sondern gleich Ersatz in Form von NiMH Powerpacks ( 7,2 V / 4,8 Ah und 2 * 6 V / 2,4 Ah) angeschafft. Die Wartezeit habe ich genutzt um in den alten Unterlagen nach zu forschen. Hier fand sich ein Blockschaltbild von 1987 das wohl noch aktuell ist. Daraus lassen sich die vorgefundenen elektrischen Unterschiede zum Original erklären. Warum aber der Servo für die Löschkanonenbewegung aus dem STRAWAP verschwunden ist wird wohl für immer ein Rätsel bleiben.
Nachdem die neuen Akkus nun verdrahtet und verbaut sind ist klar, dass es beim STRAWAP einiges zu tun gibt. Die Wasserpumpe und das Klar zum Gefecht Modul gehen gar nicht mehr. Auch die linke Fahrtregler / Speedschalter Kombo muss untersucht werden. Sie gibt immer nur Vollgas (vor oder zurück). Des weiteren drehen sich die Radarantennen nicht, obwohl das Relais des RC-Schalters anzieht.
{kind=link}
Instandsetzung STRAWAP: Status 10/2016
Elektronikreparaturen und mehr
Auch bei unserer Entwicklung von Modellbauelektronik in den Achtzigern gab es große Sprünge. Da die mit Lochrasterplatinen aufgebauten STRAWAP Fahrtregler quasi prototypische Umsetzungen sind und mit dem Schaltungskonzept des moderneren und gut dokumentierten MF 100 nicht viel gemein haben bin ich trotz intensiver Nutzung unseres Oszilloskops bei der Fehlersuche nicht recht weiter gekommen. Nach grenzüberschreitender Suche und einer astronomischen Wartezeit bis zum Sommerurlaubsende bin ich nun stolzer Verwahrer eines zweiten Aktenordners in dem das elektronische Modellbauschaffen archiviert ist. Hier fanden sich die notwendigen handgezeichneten Schaltungen und die Analyse konnte neu beginnen.
Modernisierung STRAWAP: Status 04/2021
Neues Steuerungskonzept über Mikrocontroller
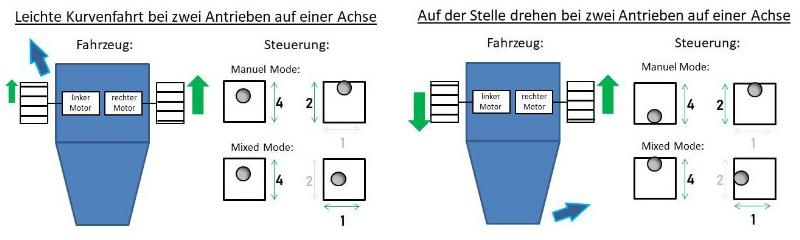
So richtig Lust auf die Analyse der Elektronikkomponenten hatte ich nicht wirklich. Daher hat sich die Weiterarbeit am Modell auch immer weiter verschoben. Schlussendlich bin ich dazu übergegangen einen Antriebsmixer für die Schaufelräder per Software umzusetzen. Ursprünglich war geplant dafür einen Arduino Nano zu nutzen. Da aber auch bekanntermaßen die Geräuschgeneratoren des STRAWAP nicht mehr recht wollten, habe ich nun einen Komplettansatz mit einem ESP32 gewählt, der Antrieb, Sound und über den Multiswitch einige Sonderfunktionen kombiniert.
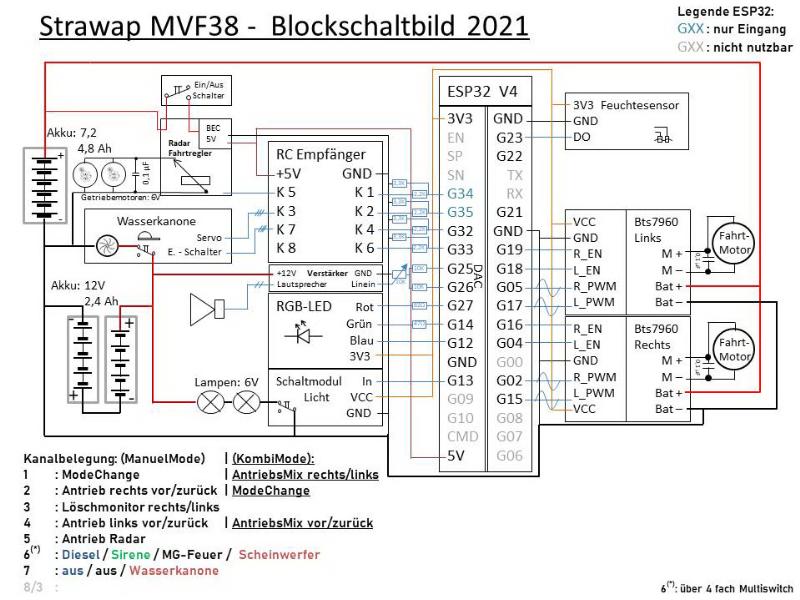
Die Antriebsmotoren werden nun über Motor Treiber H-Brücken (BTS7960) angesteuert, wobei dafür die RC-Signale der Kanäle 1,2 und 4 im ESP32 ausgewertet werden. Da unsere alten Robbe RC-Empfänger ja mit 5 Volt arbeiten und der ESP32 nur 3,3 Volt Signale verkraftet müssen diese hier mit Spannungsteilern angepasst werden. Meine Kabel mit Werten von 2,2/3,3kΩ funktionieren dabei stabil. Desweiteren habe ich aus Platznot und Gewichtsgründen die Kühlkörper der Motorsteuerungen deutlich verkleinert. Diese sind für 43A ausgelegt und sollten mit den 3 bis 4A Maximallast der Monopern Super keinen Stress haben.
Das Dieselgeräusch, die Klar-zum-Gefecht Sirene und die neu dazu gekommene Maschinengewehrsalve werden direkt vom Mikrocontroller erzeugt und über dessen DAC-Kanäle und dem alten Verstärker ausgegeben. Ebenso werden nun die Scheinwerfer über einen Relais-Baustein am ESP32 geschaltet. Das ehemals rote Blinklicht stellt nun je nach Fahrzustand des STRAWAP unterschiedliche Farben per RGB-LED dar. Der über das Blockschaltbild von 87 dazugekommene Wasseralarm wird nun über einen Feuchtesensor an den ESP und von da an den Verstärker gemeldet und per Blinkfunktion an der RGB-LED auch optisch kund getan. Der noch funktionstüchtige Summer bleibt verbaut, ist aber nun nicht mehr angebunden.
Die Software um das alles zu steuern habe ich mir aus diversen Quellen und in Eigenentwicklung zusammengetragen, portiert und erstmal lose verschaltet am PC erprobt. Das parallel entstandene Blockschaltbild diente als Basis für die Verkabelung im Modell. Weitere technische Details zu diesem Mikrocontroller Projekt habe ich auf meiner Bastelprojektseite als DualDriver abgelegt.
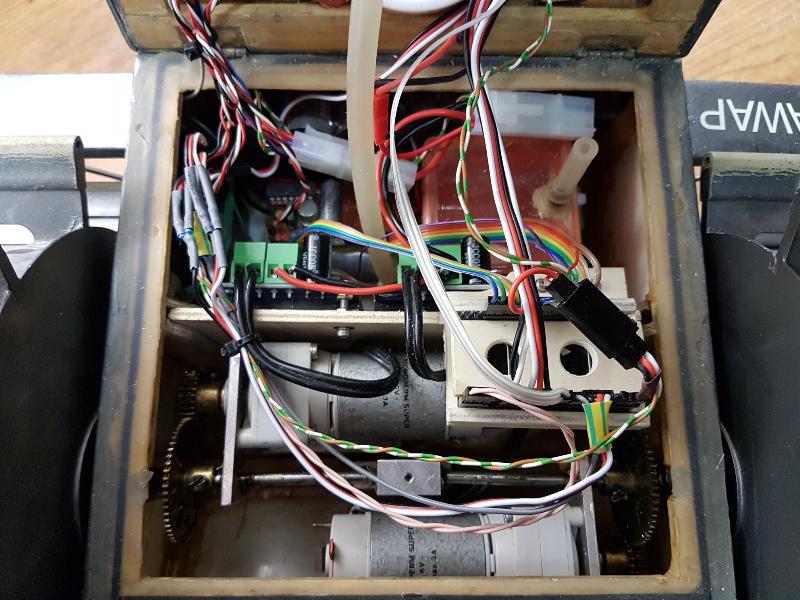
Da der Antrieb der zwei rotierenden Radarantennen nicht mehr zu retten war, wurde er gegen zwei Mikrogetriebemotoren inklusive selbstgebauter Halterung ersetzt, die nun per Fahrtregler angesteuert werden. Ein alter Servo für die Wasserkanonenbewegung fand wieder seinen angestammten Platz im Deckel und die Wasserpumpe samt Tank und elektrischen Schalter wurden nach erfolgreichem Funktionstest wieder eingebaut. Diese letztgenannten 3 Funktionen sind nun die einzigen, die direkt über den RC-Empfänger gesteuert werden.
Bei der ersten Trockenprobefahrt im Keller noch im Februar hat sich unter Last gezeigt, dass eine der Pile Getriebestufen defekt war. Einen Ersatz hatte ich noch und der Austausch konnte auch gleich zum fetten der Antriebe genutz werden. Bei weiteren Ausfällen allerdings wird es schwierig, da diese Planetengetriebe nicht mehr erhältlich sind. Auch hat es gleich den neuen Messingstab (Ersatz für abgebrochenen Holzstab), der ganz hinten die Kugel schützen soll verbogen. Daher hat er nun noch eine kleine Holzstütze bekommen.
Nun stehen noch kleinere Lackreparaturn am Rumpf an, die aus Mangel der passenden Farbe noch nicht erledigt sind. Die Probefahrt im Wasser war gleich ein Bergungseinsatz für unseren Soko 3 und ein kleines RC Sportboot im April. Der neu Mixed Steuerungsmodus hat sich hierbei absolut bewährt und macht richtig Spaß.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
wieder Betriebsbereit
seit 2020

Raumshot bei leichter Brise.
Baujahr: 1984/85
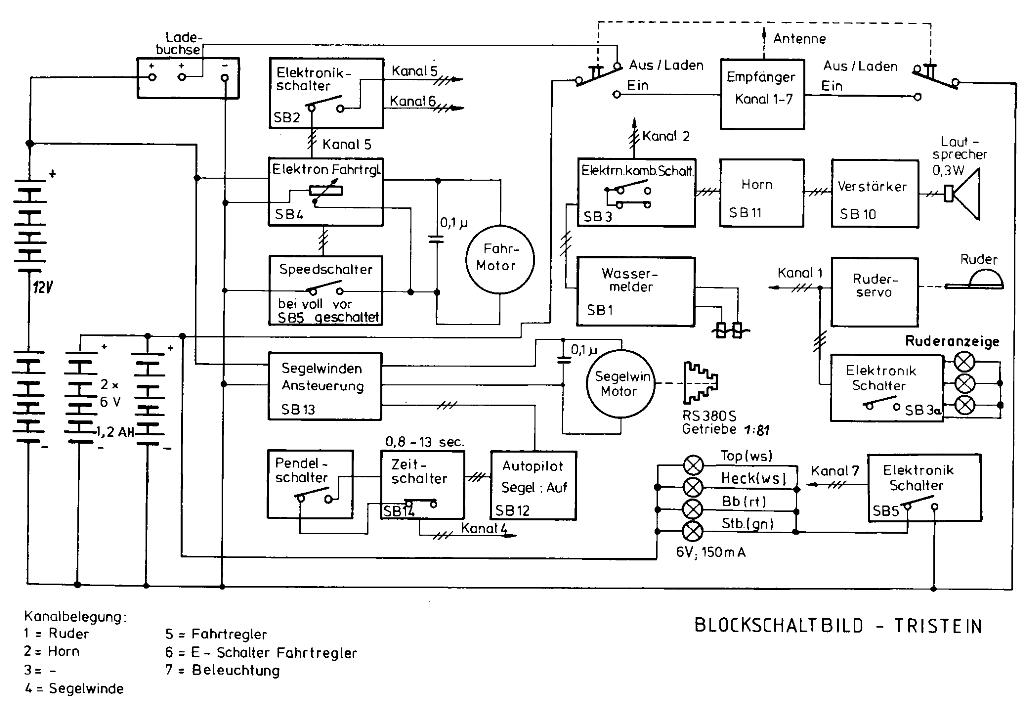
TRISTEIN
Unser Trimaran ist das einzige Experimentalmodell, welches nach der Erstellung des Bauberichtes technisch nicht mehr weiterentwickelt wurde, da wir im normalen Fahrbetrieb mit den längeren Auslegerträgern kein Optimierungspotential mehr gesehen haben.
Instandsetzung Tristein: Status 11/2016
Sichtung, Demontage und Akkutausch
Bei der erste Sichtung zeigte sich, dass es wirklich kaum Weiterentwicklung gegeben hatte und die alten Dokumente aus dem Baubericht fast noch gültig sind. Es gab nur drei kleinere Optimierungen in Form einer Gewichtseinsparung bei den Akkus, eines Dieselgeräusches für den Antrieb und Quecksilberschalter als Ersatz für den Pendelschalter der Kentersicherung. Anstatt 2 Powerpacks mit 6 V 1200 mAh für den RC Pfad war nur noch deren einer verbaut. Leider gab es auch nie einen Austausch der Akkus, was ich gut verstehen kann, da man die Elektronik-Einbauten demontieren muss um an die Akkus heran zu kommen. Das war mühselig aber auch wegen sehr viel Grünspan in den Minusadern, die ausgetauscht werden mussten, sowieso notwendig. Die Sub-Cs an sich waren in einem grauenvollen Zustand der Auflösung und haben doch einiges an Dreck und Blessuren im Rumpf hinterlassen. Die im original Blockschaltbild angegebenen Ni-Cd Sub-C Powerpacks mit 6 V 1200 mAh werden also, wie gewohnt, gegen 6 V NiMH Powerpacks getauscht. Dabei werden die knapp über 800g Sondermüll gegen einen Akkupack mit 1500 mAh für RC Pfad und Beleuchtung ersetzt. Für Segelwinde, Flautenschieber und Nebelhorn werden zwei Einheiten mit 6 V / 2400 mAh in Reihe spendiert. Damit liegen wir bei knapp über 700g mit deutlich mehr Kapazität für lange Segeltouren.
{kind=link}
Instandsetzung Tristein: Status 02/2017
Funktionsprüfung und erste Reparaturen
Da die Elektronik ja eh schon ausgebaut war und der Kabelbaum neu gemacht werden musste hab ich nun die Komponenten einzeln geprüft. Die Segelwinde funktionierte zwar, fand aber nur sehr schlecht ihren neuen Nullpunkt nach Betätigung. Das konnte so nicht bleiben, da es zu hohen Temperaturen bei Motor und Leistungstranssistoren führt. Als Fehlerquelle zeigte sich Dank des zweiteten Aktenordners ein altersschwacher Kondensator im Schmitt-Trigger der Ansteuerung. Die Fehlerquelle beim funktionslosen Flautenschieber (Fahrtregler) war ähnlich. Der Widerstandswert des Poti zum Nullpunktabgleich war außerhalb der Spezifikation und musste ersetzt werden.
Instandsetzung Tristein: Status 10/2020
Reparaturen an Rumpf und Elektronik
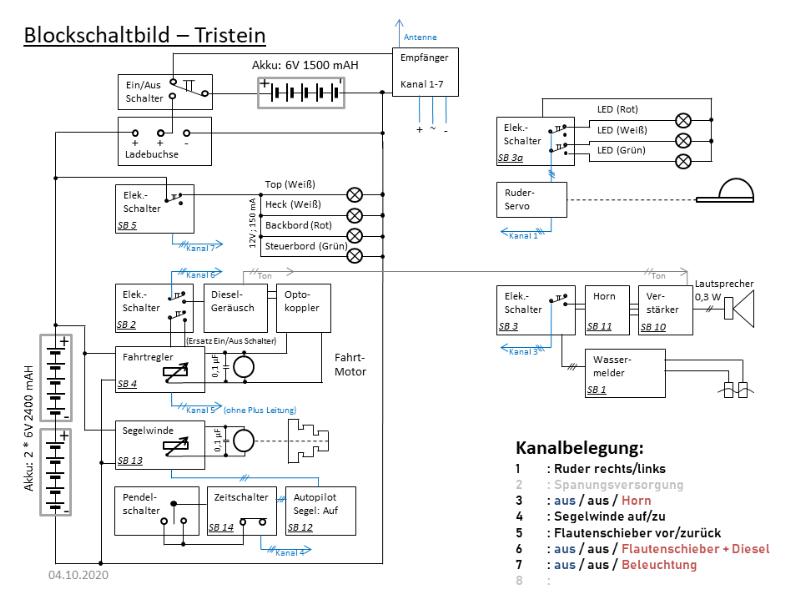
Leider war der Tausch des Poti doch keine nachhaltige Sache und auch die dazugekommenen Komponenten des Dieselgeräuschgenerators zeigten keine Funktion im System. Da es hierfür keine Dokumentation der Komponenten und der Verschaltung gab, war die Fehlersuche doch recht mühsam. Nach einigem Frust habe ich den Fahrtregler gegen ein aus dem Soko 3 ausgebautes Gerät getauscht und die Anbindung der Akustikkomponeten neu gestaltet. Dazu wurde gleich ein passender Kabelbaum für die Versorgung gebaut, der berücksichtigt, dass mittlerweile 12Volt Birnchen für die Beleuchtung verbaut waren. Um hierbei die Übersicht nicht zu verlieren wurde das Blockschaltbild neu erstellt. Mit der Segelwinde war es leider auch noch nicht getan, da sich diese extrem empfindlich gegenüber Spannungsänderungen im RC Pfad zeigte. Nach einigem hin und her war mir die alte Steuerung nicht robust genug und ich habe sie durch eine Thor15 Servoelektronik ersetzt, an der ich den BEC funktionslos legen und den Spannungsteiler über das Spindelpoti mit Zusatzwiderständen anpassen musste. Auch die weiteren Komponenten der Kentersicherung funktionieren mit der Thor problemlos. Dies tut Sie aber leider nur zu einer Seite, da einer der Quecksilberschalter nicht mehr sicher Kontakt gab. Der Austausch beider Schalter war trivial. Der Elektronikschalter für den Flautenschieber und das Dieselgeräusch funktionierte mit unserem selbstgebauten Servotester einwandfrei, eingebaut und über den alten Robbe FMSS Empfänger tat er dies aber nicht mehr. Auf die Schnelle vor der Probefahrt habe ich Diesen gegen einen neuen aus China getauscht. Leider funktionieren die meisten Billigschalter mit unseren alten RC-Systemen nicht. Der eine der schaltet tut dies aber impulsgesteuert und schaltet bei Betätigung eines andern Schaltkanals wieder ab. Bevor es zur ersten Probefahrt ging wurde noch die verbogene Reling gerichtet und neu verklebt. Auch die kleinen Schäden an der oberen Rumpfkante wurden mit Holzspachtel repariert und ein neuer Verklicker gebaut. Nach der Probefahrt habe ich nun noch eine separate Feineinstellung für Grossbaum und Fock angebracht, die am Teich leicht eingestellt werden kann. Auch das Hecklicht hat nun wieder Ersatz für ihr verloren gegangenes Glas (Deckel eines Seifenbeutels). Der alte Elektronikschalter (SB2) wurde durch den Ersatz des Kondensators im RC-Glied und des 4 Fach NOR-Gate IC (CD4001) wieder vollfunktionstüchtig und wurde gegen das Chinageraffel für den Flautenschieber zurückgetauscht.
{kind=link}
{kind=link}
Instandsetzung Tristein: Status 05/2024
Reparatur des Lümmellagers und des Baumniederholers
Wie bei unserem kleinen RC Segelboot haben die Befestigungen des Großsegel am Mast ihr zeitliches gesegnet. Das spröde gewordene Plastik der Gelenkköpfe des Lümmellagers und des Niederholers hat der Windkraft im April nicht mehr Stand gehalten. Beim Niederholer konnte einfach ein Ersatz angeschraubt werden. Beim Lümmellager musste der verklebte Stopfen aus dem Großbaum vorsichtig herausgelöst, das alte Plastik ausgebohrt und dann ein neuer Gabelkopf eingepasst werden. Es bleibt abzuwarten ob diese Lösung genauso gut und lange hält, wie bei unserer Collie.
nie wieder
Betriebsbereit

SOKO 3 vor der Renovierung

und danach
Baujahr: 1985/86
SOKO 3
Nach den ganzen Änderungen lief der Soko mit schönem Wellenbild doch recht ordentlich. Er war nun mit den kleineren Schrauben schnell und hatte Saft und Kraft für deutlich mehr als eine viertel Stunde, sodas ich endlich zufrieden war. Leider hat er sich nun im Mai 2025, ohne dass ich mir das erklären konnte, wieder seitlich überschlagen und ist in das feuchte Grab geglitten. Eine Rettung war leider nicht mehr möglich.
RIP
Instandsetzung SOKO 3: Status 02/2012
Status, Akkutausch und neuer Kabelbaum
Die in der Schlußbemerkungen des Bauberichtes bereits als notwendige Verbesserung erwähnte Wasserkühlung war nicht so einfach zu realisieren, da zwischen den 3 Motoren der dafür erforderliche Platz fehlte. Als Lösung wurde auf den wenig effektiven mittleren Turbo E-Motor mitsamt der Antriebswelle verzichtet und dafür die zwei verbliebenen E-Motoren gegen stärkere getauscht. Da diese Maßnahme Arbeiten am Rumpf nötig machten wurde dieser im Unterwasserbereich durch passend geformte Balsaholzstücke auch gleich verbreitert, um die nutzbare Auflagefläche für Gleitfahrt zu erhöhen. Aus optischen Gründen haben wir auch das 3.te Ruder entfernt. Nach den Schleifarbeiten bekam der Rumpf noch eine etwas auffälligere Farbe. Um die nun mit Wasserkühlung ausgerüsteten E-Motoren und die ebenso gekühlten Leistungstransistoren des Fahrtreglers voll aus zu reizen wurden die Akkus noch neu konfiguriert und ergaben nun ein Powerpack mit 34 Ni-Cd Sub-C Zellen zu 20,4 V mit 2400 mAh.
Als allererstes wurden die alten Ni-Cd Zellen ausgebaut. Diese hatten im Lauf der Zeit doch schon reichlich ausgegast und so den Bootsinnereien leicht zugesetzt. Der Ausbau war wegen der räumlichen Enge im Bootskörper nicht ganz so einfach, zumal das zur Fixierung der Sub-C damals verwendete Silikon auch noch nach über 20 Jahren klebte wie die Sau. Fraglich ist, ob der abgelöste Schmiernippel der rechten Antriebwelle und die ebenfalls abgefallene Elektronikbretthalterung als Kollateralschäden des Ausbaus oder als Alterungsschädigung zu werten sind. Das ändert nichts daran, dass es repariert werden musste. Da zumindest die Motoren über den verbauten Fahrtregler noch ordnungsgemäß Energie in Rotationsbewegung umwandeln wurden nur die Ni-Cds durch drei 7.2 V / 2400mAh NiMH Powerpacks ersetzt. Die ebenfalls erodierte Verkabelung wurde schnellladetauglich reorganisiert, nachdem wir in der Badewanne eine passende Verteilung der NiMH festgelegt hatten. Der Empfängerakku wurde durch einen 5 V Spannungsregler ersetzt und der Ein/Aus-Schalter entsprechend um gelötet.
Instandsetzung SOKO 3: Status 04/2012
Reparatur Fahrtregler und Optimierung der Kühlwasserzuführung
Die erste Ausfahrt am Modellteich begann sehr gut. Der Soko 3 fuhr problemlos mit ausreichender Geschwindigkeit, agil auf Ruderbewegungen reagierend mit einem schönen Wellenbild vor sich hin. Nachdem ca. die Hälfte der Akkukapazität verbraucht war stellte der Fahrtregler allerdings seine Arbeit ein. Schon am Teich war schnell klar, dass die Wasserkühlung nicht richtig funktionierte. Der Kühlkörper des Fahrtreglers war zwar ausreichend kalt, aber die Motoren waren sehr warm. Hier hatte wohl der Staudruck bei Fahrt nicht ausgereicht um das Wasser bis zur Motorkühlung zu befördern. Eine genaue Fehleranalyse mit dem Oszilloskop zeigte, dass des Weiteren die 3 BUZ11 durchgebrannt waren. Da hätte man auch vorher drauf kommen können, dass über 20 Jahre alte Wärmeleitpaste ihrer Aufgabe nicht mehr gerecht werden kann. Die Schlauchführung der Wasserkühlung wurde daraufhin optimiert (kürzere Wege und geringere Höhendifferenzen) und neue BUZ11 bestellt. Sobald die neuen MOSFETs mit neuer Paste verbaut sind geht es weiter.
{kind=link}
Renovierung SOKO 3: Status 09/2013 - 02/2014
Komplettrenovierung 2013/14
Mit neuen BUZ11 zeigte die Optimierung der Wasserkühlung leider keine Verbesserung und die armen Motoren rauchten bald wieder vor sich hin. Nachdem in 09/13 die Motoren wirklich thermisch kaputt waren und mir die aktuelle Farbgestaltung sowieso nicht gefallen hat, war das nun der Auslöser, sich zu einer Komplettrenovierung der SOKO 3 durch zu ringen. Es sind nun eine Neulackierung auf ursprüngliche Rumpffarben und größere technische Verbesserungen angedacht. Eine Wasserpumpe, zwei neue E-Motoren und dazu passende Hochlastkupplungen sind schon bereitgelegt und warten auf den Einbau.
Aktuell (11/2013) ist der Rumpf leer geräumt und für die Lackierung vorbereitet. Es gab ein paar kleinere Stellen mit Bruch im Lack bei den zusätzlichen Wasserleitleisten. Diese wurden ursprünglich wohl ohne Kunstharzbestrich verbaut. Hier ist im Lauf der Zeit Wasser direkt an das Holz gekommen und hat kleinere Schäden hinterlassen. Diese habe ich nun mit Kunstharz aufgefüllt und versiegelt.
Die neuen Antriebsmotoren haben deutlich mehr Leistung bei Nennspannung 7,2 V, sodass die Antriebsspannung von 21,6 V auf 7,2 V herabgesetzt wird (mit der Hoffnung, dass sich Wellenbild und die gewohnte Geschwindigkeit nicht verschlechtern). Die Planung ist also so ausgelegt, dass die 3 NiMH Powerpacks weiter verwendet werden können. Mit den 7,2 V sollte auch die für 12 V ausgelegte Wasserpumpe noch genug Förderleistung für die Kühlung haben.
Da bei den neuen E-Motoren die Kohlen austauschbar sind habe ich dem SOKO eine hölzerne Motorhalterungen spendiert und bereits mit GFK im Rumpf im passenden Abstand zu den Stevenrohren befestigt. Auch der Wasserpumpenhalter ist aus Holz gefertigt und mit GFK stabil im Rump verbaut.
Kurz vor Weihnachten 2013 sind nun die Motoren im neu lackierten Rumpf verbaut. Der Wasserpumpenfördermengenversuch in der Badewanne mit 7.2 V war auch erfolgreich. Nun steht die Aufrüstung des Fahrtreglers mit 10 (statt 3) Leistungstransistoren an um der stärkeren Motoren und der durch die Spannungsabsenkung erhöhten Stromstäke Rechnung zu tragen. Einen passenden Kühlkörper, haben wir ja im Programm.
Leerlauftests der eingebauten E-Motoren im Januar 2014 bestätigten die Befürchtung, dass der Strombedarf zu hoch für die Relaisumschaltung des betagten Fahrtreglers ist. Da der SOKO auf jeden Fall weiterhin rückwärtsfahren können muss kommt der skalierbare MF 100 auch nicht in Frage. Daher werden nun zwei geeignete Fahrtregler aus dem RC Fahrzeug Bereich eingesetzt. Sie wurden für den Einsatz mit unseren historischen Robbe RC-Systemen umgerüstet (Stecker), mit Wasserkühlung aufgepeppt und im Rumpf montiert.
Die erste Probefahrt am Modellteich war soweit ok. Sie zeigte zwar Optimierungsbedarf bei Maximalgeschwindigkeit und Geradeauslauf, aber es gab weder thermische Probleme bei den Motoren, noch Überlastung an den Fahrtreglern. Es zeigte sich auch schnell am Teich, dass die beiden auffälligen Themen zusammen gehören. Da beide Antriebe über separate RC-Kanäle angesprochen werden konnte ich SOKO 3 mit Vollgas auf der einen Seite und ca. 4/5 Gas auf der anderen Seite in einen sauberen Geradeauslauf bringen. Folglich waren die beiden Tuningmotoren doch von der getimeten Sorte (Laufrichtungsoptimiert). Da ich die Motoren zum Drehmomentausgleich aber gegenläufig betreibe bringt der falsch herum laufende Motor nicht seine volle Leistung und trägt weder ausreichen zur Maximalgeschwindigkeit bei noch unterstützt er einen sauberen Geradeauslauf bei neutralem Ruder.
{kind=link}
{kind=link}
Optimierung SOKO 3: Status 03/2015
Optimierungen zur Saison 2015
Da man bei den beiden Tuning-Motoren das Timing einstellen kann wurden diese nochmals ausgebaut und auf Basis des Leerlaufstromverbrauches eingestellt. Insofern die Betriebszeit des SOKO 3 mit 3*2400 mAh Powerpacks ausreichend war und ich über den Winter 14/15 günstig an 2 falsch konfektionierte 4800 mAh Powerpacks gekommen bin, setze ich nun diese aus Gewichtsoptimierungs- und Ausfallreduzierungsgründen ein. Die zwei selbst konfektionierten Powerpacks sind leichter als die vorher benutzten 3 mit weniger Kapazität. Zudem ist mit nur zwei Powerpacks die Möglichkeit gegeben die Spannungsversorgung der Antriebe aufzutrennen. So ist es beim Ausfall einer Antriebeinheit noch möglich mit der Zweiten ans Ufer zu kommen. So vorbereitet ging es mit einer kleinen Auswahl an unterschiedlichen Schiffsschrauben in der Tasche an den Modellteich. SOKOs Vmax ließ sich aber nicht merklich verbessern und die Leistungsdifferenz der beiden "baugleichen" Motoren besteht in einem geringeren Masse weiter. Da ist weiterhin noch Feinabstimmung notwendig. Nachsatz 2016: So ganz zufrieden mit dem Wellenbild bin ich noch nicht und beim falsch herum laufenden Motor lässt sich ums Verrecken keine Einstellung finden, die dieselbe Leistung, wie bei seinem Partner bringt, sodass der SOKO 3 bei Volllast einfach nicht geradeaus fährt.
Modernisierung SOKO 3: Status 04/2021
Modernisierung zur Saison 2021
Auf ein Neues mit neuen Komponenten. Ich konnte günstig zwei Brushless-Systeme für Boote mit Wasserkühlung erstehen, die nun den SOKO 3 antreiben sollen.
Da sowohl die neuen Motoren, als auch die dazugehörigen Regler für Spannungen bis 11.2 Volt (LiPo S3) ausgewiesen sind gehe ich nun mit 3 NiMh Powerpacks (mit 5,3Ah) ins Rennen, die zu zwei Packs mit je 9 Zellen und somit 10,8 Volt um konfektioniert wurden. Der Kabelbaum kann im Prinzip so bleiben, bekommt nur stromfestere Steckverbindungen. Ein Ein/Aus-Schalter wird nicht mehr benutzt. Weil die BEC der Regler nicht schaltbar sind, müsste man mit Schaltern im Strompfad der Antriebversorgung, die 70 Ampere abkönnen, arbeiten. So steht nun an, die zwei Akkupacks erst am Teich zu verbinden und nach der Fahrt gleich wieder vor Ort ab zu trennen. Mit den neuen Brushless-Motoren, die leicht kürzere Wellen haben lassen sich die Hochlastkupplungen nicht mehr so verbinden das das Drehmoment sicher übertragen werden kann. Hierfür habe ich längere elastische Zwischenteil (20,5mm statt 13,5mm) im Internet gefunden und in Verbindung mit dazugehörigen Sicherungsringen montiert. Die voluminöseren Regler und Powerpacks im Rumpf unterzubringen und sowohl elektrisch als auch mit dem Kühlwassersystem zu verbinden war eine Herausforderung, die kleinere Umbauten an der Elektronikbretthalterung und vor der Wasserpumpe erforderlich machten.
Die ersten Probefahrten in 02/2021 haben gezeigt, dass die NiMh-Akkus der Stromlast der Brushless-Antriebe nicht gewachsen sind und derren Spannung massiv einbricht. Nach herunterfahren der Spannungsüberwachung der Fahrtregler war das Fahrtbild der SoKo wirklich schön bis knapp 3/4 Last. Bei Volllast aber haben die Regler recht schnell abgeschaltet, liesen sich aber sofort wieder aktivieren. Da Ni-Cd Zellen heutzutage keine Option mehr sind, muss ich mich wohl nun doch mit der LiPo Akku-Technik beschäftigen.
Mit den neuen LiPo's ging der Soko jetzt im April gleich nochmal deutlich besser bei Beschleunigung und Geschwindigkeit. Er ist nun fast schon zu agiel und braucht eine ruhige Hand am Sender. Leider ging der Spaß gerade mal 3 Minuten bevor die Motoren antrieblos durchdrehten. Nach der Bergung über Kühlwasser Antrieb und Bergungspanzer zeigte sich, das es wohl eine Astüberfahr gab. Kausal ging deshalb eine Antriebschraube verloren, die zweite Schraube war beschädigt, deren Motorkupplung war abgelöst und die Verklebungen des Wellenbocks dieses Stevenrohres war ausgebrochen. Nur gut, das es keinen Wassereinbruch gab! Die Schäden waren schnell repariert und die Schiffsschrauben schnell ersetzt, sodas die nächste Probefahrt ansteht.
Nachsatz 06/2021: Bei der nächsten Probefahrt ist Soko 3 ebenso schnell havariert, wie zuvor. Er ist schlagartig abgebogen und hat sich dabei überschlagen. Zum Glück hat sich eine Luftblase im Rumpf gehalten, sodas er verlustfrei nach gut einer Stunde geborgen werden konnte. Auch hier gab es massive mechanische Schäden an der Ruderanlage, einer Antriebsschraube und derren Stevenrohrbefestigung, die unisono auf eine weitere Astüberfahrt hindeuten. Ich glaube ich muss mein Einsatzgewässer für den Soko 3 überdenken. :(
{kind=link}
Instandsetzung SOKO 3: Status 11/2021
Reparatur der Havarieschäden
Nach schonender Trocknung liesen sich alle Elektornikkomponenten bis auf den selbstgebauten RC-Schalter für die Kühlwasserpumpe wiederverwenden. Für diesen RC-Schalter haben wir aber noch Ersatz. Auch die Ruderservohalterung war recht schnell verklebt und die Ruderanlage justiert. Die verlorengegangene Plexiglasscheibe an den Aufbauten wurde ersetzt und auch die Reling wieder gerichtet. Abschliesend galt es noch eine neue D-Flagge am Heck zu montieren. Ob die LiPos noch Leistung bringen lässt sich dann aber erst am Modellgewässer klären, genauso ob die nun montierten Antriebsschrauben mit etwas kleinerm Duchmesser eine Verbesserung darstellen.
wieder in Renovierung
seit 11/2019

Wellenbild aus den Achzigern
Baujahr: 1986/87
SCHLUMPFO 4
Die im Baubericht als in Arbeit erwähnte Installation einer Nebelerzeugung wurde erfolgreich abgeschlossen. Die Idee über einen Mikrocontroller die Koordination der beiden Voith-Schneider-Antriebe zu vereinfachen wurde aber nicht weiter verfolgt. Dafür wurden im Zusammenhang mit dem Schlumpfo ein modularer RC-Memory-Schalter (MF 120) entwickelt um das Modell mit einer 4-Kanal Anlage betreiben zu können. Das Modul wurde aber nicht eingebaut.
Instandsetzung Schlumpfo: Status 12/2010
Funktionsprüfung
Die erste Sichtung und Funktionsprüfung zeigte außer den obligatorisch defekten Akkus ein sehr vielversprechendes Bild. Bis auf die Nebelerzeugung, welche wegen fehlender Nebelflüssigkeit noch nicht getestet wurde, ließen sich alle Funktionen im Trockenversuch mit 6/12V DC Spannungsgenerator in Betrieb nehmen. Außer Kleinigkeiten wie die abgebrochene Luftschleusentür (noch vorhanden) oder die nicht mehr an ihrem Platz fixierten Schlümpfe auf Deck (auch noch vorhanden) gibt es momentan nichts zu berichten.
Instandsetzung Schlumpfo: Status 04/2011
Akkutausch
Mit den über den Winter angeschafften 4 6 V/3.2 Ah Bleiakkus (6 V/6.4 Ah für RC und Antrieb sowie 12 V/3.2 Ah für die Sonderfunktionen) und der ebenfalls besorgten Flüssigkeit für die Nebelmaschine war die erste Ausfahrt am See ein voller Erfolg. Alles hat problemlos funktioniert und nicht nur unsere Kinder hatten über eine Stunde ihren Spaß mit dem Schlumpfo 4 und dem PT 109. Ein bisschen Bedenken hatte ich schon, da wegen der Modellbreite eine Inbetriebnahme in der Badewanne nicht möglich war und so die alten Dichtungen an den Voith-Schneider Antrieben direkt am See getestet wurden.
{kind=link}
Instandsetzung Schlumpfo: Status 06/2020
Rumpfrenovierung
Nach etlichen schönen Ausfahrten in den letzten Jahren hatten wir im Herbst 2019 leider einen kleinen Wassereinbruch, da die Verklebung zweier Rumpfplatten undicht geworden ist. Es gab zwar keine Schäden an der Technik, aber eine Renovierung des Unterteils des Rumpfes lies sich nun nicht mehr vermeiden. Die gesamte Elektronik, mit Ausnahme der Voith-Schneider-Antriebe, wurde ausgebaut und der nackte Rumpf von innen mit GFK verstärkt. Außen wurden die über die Jahre geschrumpften Klebefugen mit Kunstharz gefüllt und neu, metallic Blau lackiert. Leider gab es auf Grund von chemischen Reaktionen von Lack und Untergrund Blasenbildung und ich habe mich erst mal anderen Projekten zugewand.
{kind=link}
Modernisierung Schlumpfo: Status 02/2021
Planung einer Rotationsregelung
Mutig geworden durch die Modernisierung des Strawap MVF 38 mit einem ESP32 Mikrocontroller wollte ich nun die schon im Baubericht aufgekommene Idee einer automatischen Rotationssteuerung beim Schlumpfo per Mikrokontroller angehen. Als erstes musst aber das Thema mit dem Unterteil des Rumpfes behoben werden. Also beim zweiten Versuch nochmals geschliffen, diesmal mit Füllspachtel isoliert, feingeschliffen und dann erneut lackiert; und schon hat es gepasst.
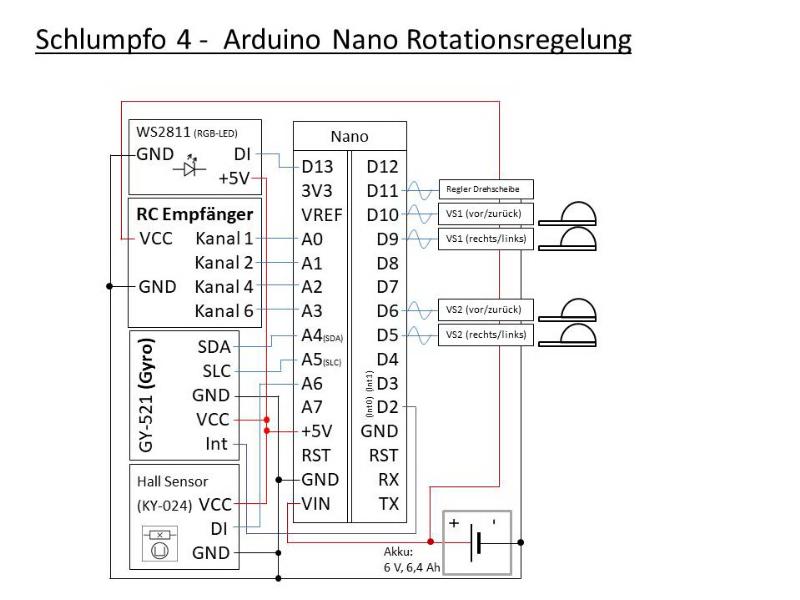
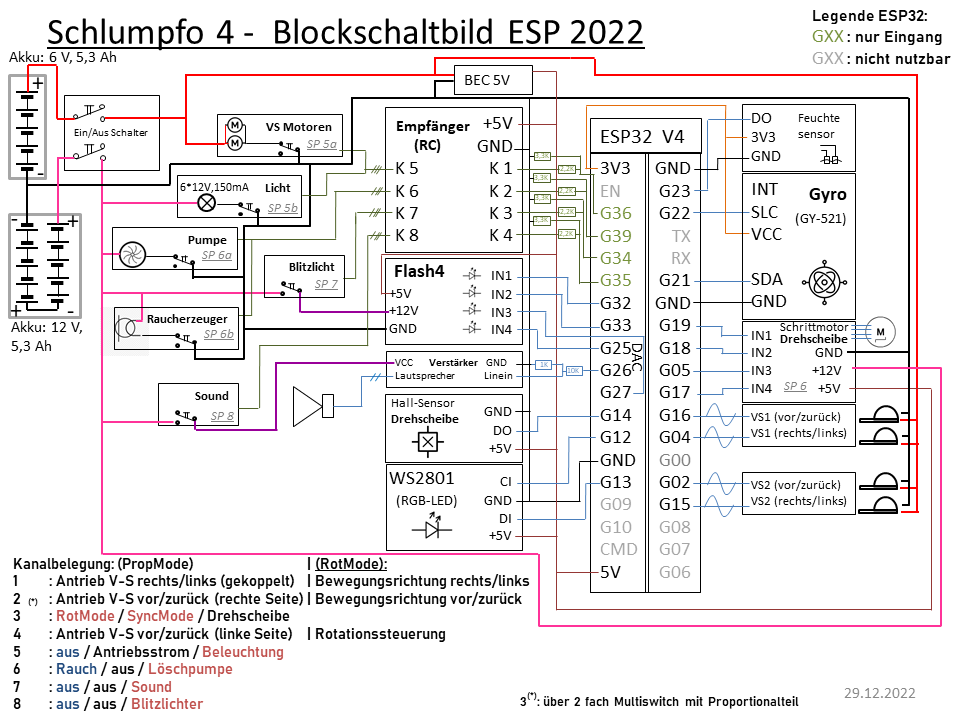
Da unsere alten RC Systeme mit 5 Volt arbeiten und diesmal auch Servos und ein Fahrtregler an den Micorkontroller angeschlossen werden, habe ich mich für einen Arduino Nano entschieden, mit der Hoffnung, dass er für die notwendigen trigonometrischen Berechnungen, die interruptgesteurte Auswertung der Empfängersignale und die PWM-Ansteuerungen der Servos ausreichend Leistung hat. Nach einiger Überlegung bin ich der Meinung, das es eine Regelung statt einer Steuerung braucht. Daher soll die Rotationsgeschwindigkeit und Lage zur gewünschten Bewegungsrichtung über ein MPU-6050 3-Achsen-Gyroskop mit Beschleunigungssensoren ausgewertet werden. Als i-Tüpfelchen ist noch die Syncronisierung der Oberdeck-Drehscheibe zusammen mit 12 RGB-LEDs geplant, sodas die Scheibe bei Rotation des Schlumpfo immer in Fahrtrichtung zeigt oder andere Sperenzchen machen kann. Dafür soll ein Hallsensor und Magnetklebeband die notwendigen Lageinformationen anliefern. Anhand eines Blockschaltbildes mit Arduino Pinout wurde dieser lose für die SW Entwicklungs am PC verkabelt und soweit möglich Funktion für Funktion getestet.
{kind=link}
Modernisierung Schlumpfo: Status 04/2021
Einbau der Komponenten für die Rotationsregelung
Wie beim Strawap MVF 38 bin ich wieder bei einem ESP32 Mikrocontroller gelandet, da der Nano mit den vielen trigonometrischen Berechnungen im 20ms Takt der RC Empfängersignalverarbeitung und der PWM Aufbereitung für die Steuerservos der VS-Antriebe am Limit war. Auch bei diesem
Software Projekt habe ich, wie bei der Umsetzung des DualDriveMixers für den Strawap die Interruptkonflikte bei gemeinschaftlicher Nutzung der RTM Funktion für LED (WS2811) und RC PWM Auswertung nicht lösen können. Daher bin ich für den Schlumpfo auf WS2801 LED-Treiber umgesiegen, die sich konfliktfrei einbinden lassen.
Für eine prognostizierte Rotationsgeschwindigkeit von 2 Umdrehungen pro Sekunde waren unsere altgedienten Robbe RS20 oder RS80 Servos zu träge. Flinkere Steller waren auch schnell angeschaft, aber es mussten auch mechanische Hürden genommen werden. Die alten indirekten Ansteuerungen über Drehhebel hatten gewolltes Spiel, um die Limitierung der VS-Ansteuerwege zu kompensieren. Die Antriebe erlauben keine Ansteuerung auf Vollausschlag horizontal und gleichzeitig vertikal, wie es die RC Sender umsetzen. Daher habe ich eine Limitierung über die Software umgesetz und steuere die VS-Antriebe nun spielfrei direkt an. Dafür mussten neu Servohalterungen gebauten werden.
Um den Schlumpfo wartungsfreundlicher zu bekommen habe ich mich um eine Verschlussmechanik für das Rumpfoberteil gekümmert. Hierzu wurde eine Möbelklappschanier zweckentfremdet.
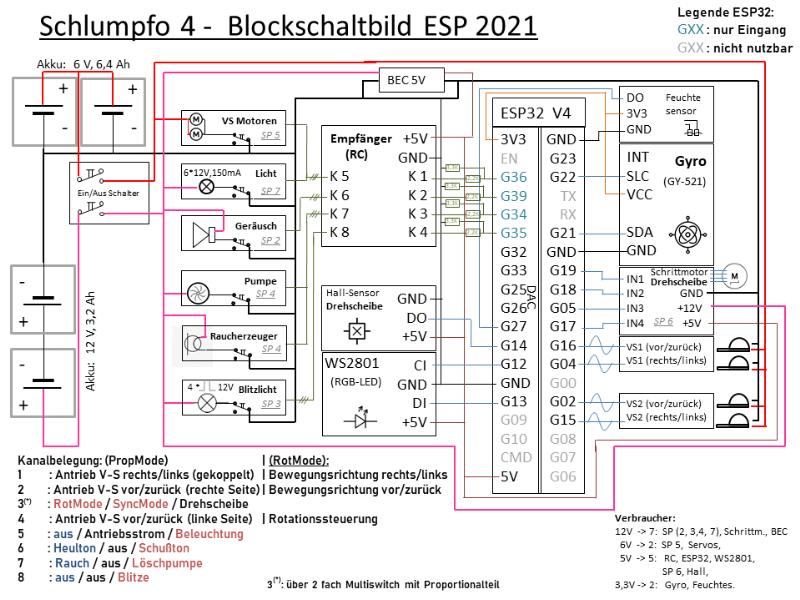
Den ersten Ansatz die Drehscheibe über einen Fahrtregler zu Steuern habe ich wieder verworfen, da mir eine Umsetzung über einen Schrittmotor flexibler und interessanter erscheint. Mit dem SwitchProp als Steller haben die ersten Versuche mit einem ESP32 Mikrocontroller, einem L298N Motortreiber und einem NEMA 17 Schrittmotor Rotationsgeschwindigkeiten der Drehscheibe von bis zu 2,5 Umdrehungen pro Sekunde ergeben. Mittlerweile ist nun ein neues Blockschaltbild für den ESP32 mit allen Funktionen des Schlumpfo vorhanden.
Nachsatz 07/2021: Im Modell sieht es dann immer etwas anders aus, als auf dem Papier. Leider gibt es regelmässig Resets beim ESP32, wenn die Antriebsmotoren eingeschaltet werden, was zu Rekalibrierungen der Softwarefunktionen führt. Hier muss die Anbindung des BEC über den 6Volt Pfad überdacht werden. Auch kam es zu leichtem Wassereinbruch über die VS-Antriebe. Ob dies über die Dichtungen oder die Welle kommt muss noch geprüft werden.
{kind=link}
{kind=link}
Modernisierung Schlumpfo: Status 06/2023
Revision VS-Antriebe und noch mehr Modernisierungsmaßnahmen
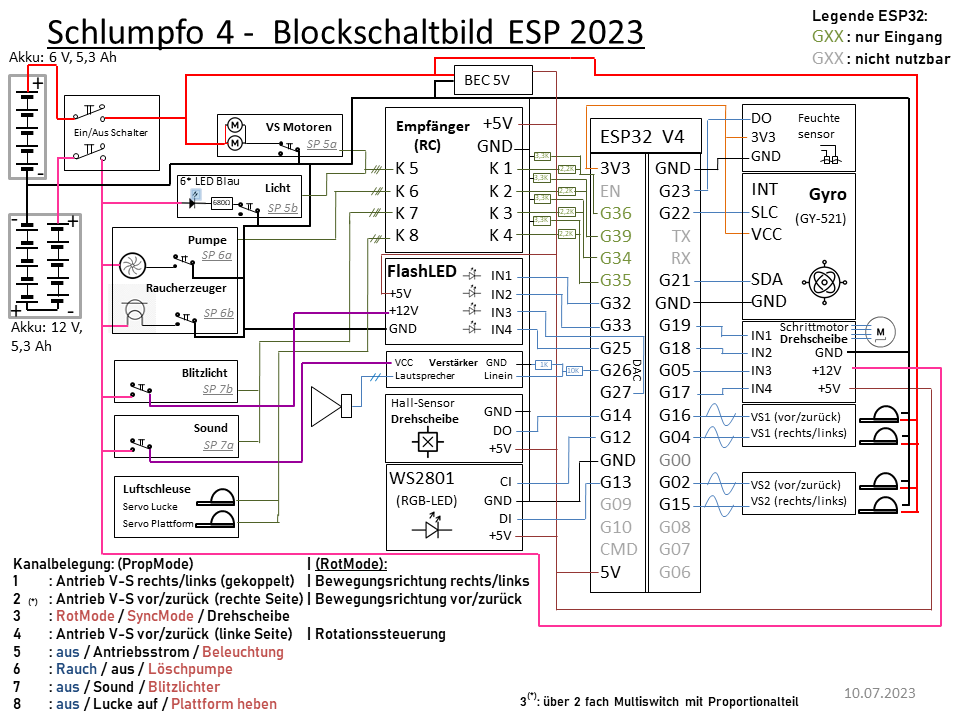
01/2023: Das Wasser kam über die Welle und hatte sowohl Gewichtseinsparmaßnahmen als auch eine Revision der VS-Antriebe zur Folge. Um abzuspecken mussten die Bleiakkus leichteren mit NiMH Technik weichen. Ebenso habe ich den doch recht schweren Trafo inklusive der Ansteuerelektronik und der Lampen für die Blitze-Funktion entsorgt. Diese wird nun auch über den ESP32 und einen 4 Kanal MOSFET-Schalter, an denen High-Power 3W-LEDs angeschlossen sind, ersetzt. Das sollte die VS-Antriebe im Schlumpfo4 wieder über die Wasserlinie bringen. Auch hat sich gezeigt, dass der Geräuschsimulator keine Turbinengeräusche mehr erzeugt und aus meiner Sicht ist ein Lasergeräusch für einen pazifistischen Schlumpfo auch nicht mehr Zeitgemäß. Daher sollen nun die Geräusche auch noch über den ESP32 erzeugt und über einen der ESP32 eigenen DAC-Kanäle an den 15W Verstärker übermittelt werden. Somit sind nun wirklich alle verfügbaren Ports des Mikrocontrollers genutzt, wie das neue Blockschaltbild zeigt. Eine genauere Beschreibung dieser Zusatzfunktionen und deren Softwareumsetzung habe ich auf meiner Bastelprojektseite als Stepplight abgelegt.
Für die zwei WS2801 LED Ketten musten ja 24 Löcher in die Oberschale des Schlumpforumpfes gebohrt werden. Obwohl ich sehr vorsichtig war und von beiden Seiten halb gebohrt habe ist mir das alte Holz doch an einigen Bohrungen gesplittert, sodas repariert und neu lakiert werden muss. Wo dies dann nun eh notwendig war habe ich mir in den Kopf gesetzt, den Astronautenschlumpf nicht mehr einfach auf dem Deck stehen zu haben, sondern eine Luken/Aufzug-Sonderfunktion mit zwei Servos an einem RC-Kanal umzusetzen. Das 6,5 cm durchmessende Loch im Deck war schnell gemacht. Die Konstruktion der Lucke und der Hebevorrichtung nicht, da unter Deck nur sehr wenig Platz zur Verfügung steht. Es musste die Lucke erst halb geöfnet werden um Platz zu schaffen, dass der Schlumpf angehoben werden konnte. Dabei war eine mechanische Lösung pflicht, weil am ESP32 beim besten willen kein Pin mehr frei ist und ein zweiter Mikrocontroller mir nicht ins Ufo kommt. Meine prototypische Umsetzung ist nun nach zwei bis drei Nachkorrekturen (unter anderem auch am Kippschalter am Sender) funktionstüchtig und es kann mit den restlichen Themen, die im neuen Blockschaltbild noch unerledigt sind weitergehen.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Noch nicht wieder
Betriebsbereit

Baujahr: 1987/88
FLUTOR 5
Mit der am Ende des Bauberichtes angesprochenen Steuerungsthematik bei Unterwasserfahrt haben wir uns nicht zufrieden gegeben. Der Flutor bekam daher noch einen Flügel zwischen den Auspuffrohren installiert, wie er auf dem links platzierten Bild zu sehen ist. Damit wird bei schneller Unterwasserfahrt das Heck nach unten gedrückt und so ein sauberer Tauchbogen unterstützt. Tauchfahrten bei denen Flutor mit dem Heck voran irgendwo wieder auftaucht waren damit fast nicht mehr möglich.
Instandsetzung:
Instandsetzung steht noch aus.
wieder Betriebsbereit
seit 2010

Kleinmodell PT 109 wieder fit für neue Ausfahrten.
Baujahr: 198x
PT 109 (Baukastenmodell von Revell)
Der PT 109 ist ein kleines Plastik-Modell im Maßstab 1:72 von Revell. Der Reiz war dieses kleine Modell fernsteuerbar zu machen. Der erste Versuch mit 4,8 V AA-Akkus scheiterte auf dem Grund des Modellteiches. Ursache dafür war die zu hohe Wasserlinie. Deshalb drang über die Ruderwelle beim rückwärtsfahren Wasser ein, welches den Fahrtregler kurz schloss und das so nicht mehr steuerbare, rückwärtsfahrende Boot volllaufen ließ. Nach der Bergung und Sichtung des Schadens wurde der PT 109 in einer optimierten Form nochmals komplett neu aufgebaut. Durch die Verwendung von 2/3 AA-Akkus (mit 6 V), einem leichteren Ruder-Servo und weiteren kleineren Leichtbaumaßnahmen konnte die Wasserlinie deutlich reduziert und die Marschgeschwindigkeit verbessert werden.
{kind=link}
{kind=link}
Instandsetzung PT 109: Status 10/2010
Akkutausch
Da nur leichte Schäden an den Aufbauten und Kleinteilen auf Deck vorhanden waren, lies sich der PT 109 sofort wieder in Betrieb nehmen. Bei der ersten Probefahrt zeigte sich aber, dass die Kapazität der uralten Ni-Cd Akkus nicht mehr ausreichend war. Sie wurden durch gleichgroße und schwere NiMH Akkus mit einer Kapazität von 700 mAh ersetzt. Die abgebrochenen Anbauteile wurden, soweit noch vorhanden auch wieder angebracht. Da Geschwindigkeit und Wendigkeit des Schiffchens optimal für Fahranfänger sind, dient es nun als Trainer für unsere Jungs.
Nachsatz 2016: Mittlerweile haben sich doch einige Kleinteile beim Betrieb auf dem Modellteich verabschiedet und der PT sieht schon recht zerrupft aus. Auch haben die Kids das Interesse am PT verloren, da er zu wenig "Action" liefert, obwohl er sich technisch immer noch robust betreiben lässt.
{kind=link}
Instandsetzung PT 109: Status 10/2013
Umsetzung Seeschlachtschäden
Mittlerweile hatten sich doch einige Kleinteile beim Betrieb auf dem Modellteich verabschiedet und der PT sah schon recht zerrupft aus. Mit etwas Farbe und Kreativität wurde der PT 109 über den Winter nun so umgestaltet, als ob er aus einer Seeschlacht mit knapper Not entkommen konnte.
Da er bei den letzten Ausfahrten immer etwas Wasser im Rumpf hatte wurde auch noch die original Silikondichtung zwischen Rumpf und Deck durch eine neue ersetzt.
Betriebsbereit
seit 2025

Der Daycruiser bei der zweiten Einstellfahrt.
Baujahr: 2023/25
Solö Ruff (Baukastenmodell von Nordic Class Boats)
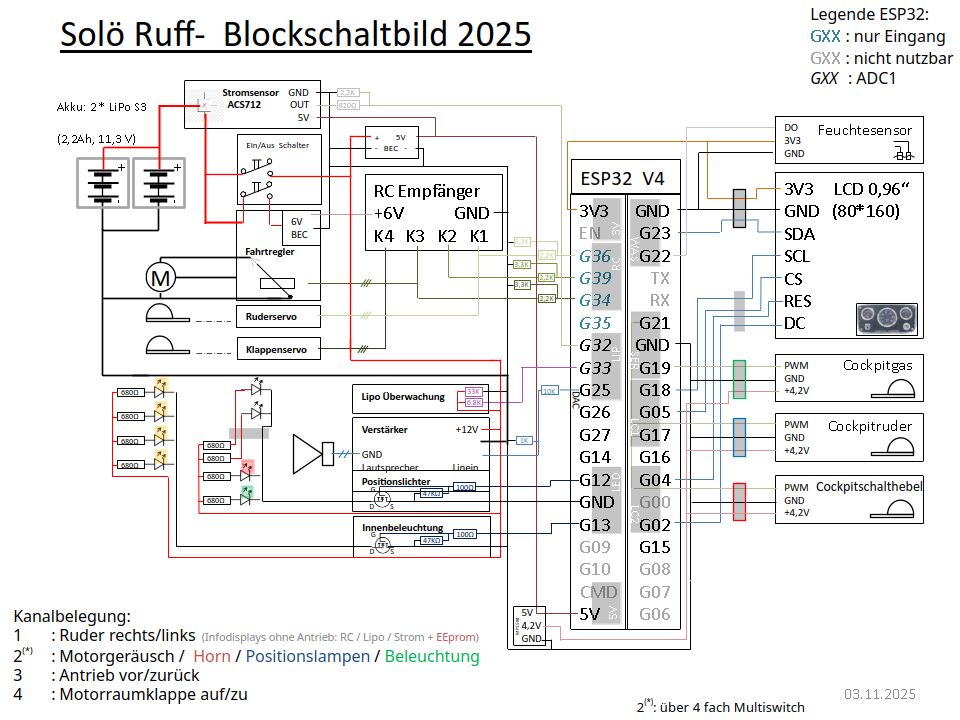
Das Baukastenmodell Solö Ruff von Nordic Class Boats hat mir optisch und mit seiner klassischen Holzbeplankung in Klinkerbauweise gleich sehr gut gefallen. Der Baukasten ist als Standmodell ausgelegt, aber darin alle notwendigen RC-Komponenten und die nicht ganz so notwendigen Sonderfunktionen, die über einen mit dem RC Empfänger verbundenen ESP32 koordiniert werden zu verstecken war die Herausforderung an diesem Projekt. In Summe haben wir hier auf 70cm Boot einen brushless Motor mit Fahrtregler und zwei Akkus sowie 5 Servos, 8 LEDs, 3 Sensoren und desweiteren je einen Empfänger, Mikrocontroller, Verstärker, Lautsprecher, BEC, DC-DC Wandler und LCD-Display verbaut und gemäß Blockschaltbild verbunden.
{kind=link}
Inbetriebsetzung:
Die Lillesol hat ihre Jungfernfahrt in 03/2026 erfolgreich absolviert.
wieder Betriebsbereit
seit 2010

Mit frischem Dreck an alten Offroad-Reifen
Baujahr: 198x
Turbo Rocky (Baukastenmodell von Kyosho)
Der Turbo Rocky ist ein Baukastenmodell im Maßstab 1:10 von Kyosho mit E-Motor (original mit Mabuchi RS 540er) und Allradantrieb über Kette. Das Modell wurde mit 4,8 V 2/3 AA-Akkus für den RC-Pfad und mit 8,4 V Sub-C für den Antriebs-Pfad bestückt. Die Sub-Cs befeuern einen Tuningmotor von Conrad, der immer noch im Katalog von 2010 feilgeboten wird. Der Fahrtregler ist eine kompakte Version des MF 100 mit Relaisumschaltung für Rückwärtsfahrt aber ohne Wasserkühlung.
Instandsetzung Turbo Rocky: Status 11/2010
Akkutausch
Durch die Erfahrungen mit dem PT wurden gleich alle Ni-Cd Akkus gegen neue NiMH Akkus ersetzt (7,2 V mit 2000 mAh und 4,8 V mit 700 mAh). Beim ersten Probecrash gegen eine Wand löste sich der mit doppelseitigem Klebeband fixierte Fahrtreglerhalter und verursachte kleinere Schäden am MF 100. Erneutes Verkleben des Halters, diesmal mit Heißkleber und 10 Min. Arbeit mit dem Lötkolben beseitigten die Themen. Das Modell ist mit 7,2 V immer noch zu schnell für die Jungs und wird daher wohl einiges einstecken müssen.
Instandsetzung Turbo Rocky: Status 12/2011
Reparaturen und neue Reifen
Da wir in der Saison 2011 einige Male mit dem Rocky unterwegs waren musste er, wie befürchtet, einige Crashs einstecken. Das machte peu à peu Arbeiten an der Antriebskette, dem Servo-Saver, der Federbrücke an der Hinterachse und dem Fahrtregler erforderlich. Mittlerweile kommen die Jungs mit dem Buggy recht gut zurecht und haben viele Spaß damit. Die Substanz des Turbo Rocky ist immer noch richtig fit, sodass er nun zu Weihnachten neue Schuhe (äh Reifen) und einen Sparingspartner bekam.
{kind=link}
Instandsetzung Turbo Rocky: Status 02/2014
Umrüstung auf RC-Pistolengriffanlage
Mittlerweile haben wir nun 3 Geländefahrzeuge, da zu Weihnachten für eins der Kids ein brushed Trucky unter dem Baum lag. Der gedrosselte Rhino ist nun auch fest in Kinderhand, sodass für mich der gute alte Turbo-Rocky bleibt. Um hier für fairen Wettbewerb zu sorgen habe ich den Rocky auf eine 2,4 GHz RC-Anlage umgerüstet. Der original Servo und der selbstgebaute Fahrtregler bleiben erhalten und haben nun die heutzutage an RC-Empfängern gängigen Steckverbindungen angelötet bekommen. So macht das Wühlen im Dreck gleich wieder doppelt Spaß
{kind=link}
{kind=link}
Instandsetzung Turbo Rocky: Status 10/2017
Ersatz der Querlenker
So einiges an Reparaturen und der Einbau von Ersatzteilen gehören bei den Offroadern ja quasi mit zum Betrieb dazu. Das ist bei den "Neufahrzeugen" auch kein wirkliches Problem. Als aber bei einem Zusammenstoß unserer zwei Buggys ein Querlenker des Turbo Rocky brach wurde mir ganz mulmig. Einen rechten Vorwurf konnte ich dem anderen beteiligten Fahrer nicht machen, da alle 4 dieser Plastiklenker schon recht versprödet waren. Recht mutlos ging ich also im Internet auf die Suche nach Ersatz und überlegte mir schon Alternativen wie 3D Druck oder die Erstellung einer Negativform zum Erstellen von GFK-Ersatz. Ich konnte es erst gar nicht glauben, als ich original Querlenker von Kyosho in den Beständen eines deutschen Modellbau-Onlineshops fand. Auch nach erfolgreichem Abgleich der Bestellnummern mit denen aus meinem über 30 Jahre alten Handbuch war ich auf Grund des sehr moderaten Preises immer noch skeptisch. Erst als die Teile nicht mehr auf meiner Werkbank lagen, sondern problemlos am Turbo Rocky montiert waren konnte ich mein Glück fassen.
wieder Betriebsbereit
seit 2016

wieder auf der Straße
Baujahr: 198x
Mr. Wheelie (Baukastenmodell von Kyosho)
Mr. Wheelie ist ein Baukastenmodell im Maßstab 1:12 von Kyosho. Es gab ihn mit Mini, Käfer und Datsun Z Karosserie. Unseren Baukastenkarton mit Datsun Außenhaut habe ich auch in den 80igern nie gesehen, da das Modell damals schon gebraucht angeschafft wurde und in Teilen wieder aufgetaucht ist. Der Z konnte mit seinem kleinen 380iger Elektromotörchen und einem 8,4 V Ni-Cd Powerpack ganz prima Männchen machen und spaßig herum wuseln.
{kind=link}
Instandsetzung Mr. Wheelie: Status 05/2016
Wiederaufbau mit neuen RC Komponenten
Da von der Umrüstung auf RC-Pistolengriffanlage beim Turbo Rocky noch ein Empfänger übrig war und im Strawap eh noch ein Servo mit altem Robbe Stecker fehlt, wird der Mr. Wheelie nun mit 2.4 GHz Technik und einem neuen Standard Servo mit zum Empfänger kompatiblen Stecker aufgebaut. Passend zu den 7,2 V Powerpacks im Fundus wurde der originale 380iger gegen einen etwas leistungsstärkeren Igarashi-Motor ersetzt. Wie auch beim Rocky wird der originale Fahrtregler MF 100 mit Relaisumschaltung für Rückwärtsfahrt aber ohne Wasserkühlung weiterverwendet. Dafür wurde er von AMP auf die heutzutage üblichen Tamiya Stecker umgerüstet. Auch der separate Empfängerakku wurde erneuert. Sein Gewicht am Heck wird beim Wheelie machen helfen. ;)
Instandsetzung Mr. Wheelie: Status 07/2016
Probefahrt und erste Reparaturen
Bei der ersten Probefahrt des "Neuen" zeigte sich der Igarashi-Motor mit 7,2V Powerpack als eine fast schon zu drehmomentstarke Kombination. Mr. Wheelie hebt bei jedem zügigen Anfahren die Vorderräder in die Luft. Kurvenfahrten sind extrem untersteuernd, da die Vorderräder null Grip aufbauen, beim gaswegnehmen lenkt er aber dann doch sehr spontan ein. Also perfekt zum spaßigen rumtrollen, aber nix für ernsthaftes Racing. Mit der RC-Pistolengriffanlage lässt sich das aber alles gut kontrollieren. Durch die harten Erschütterungen beim wiederaufkommen der Vorderachse gab es dann aber nach einiger Zeit Problemchen mit sich lösenden Verschraubungen der Zuleitungen am Fahrtregler. Nach deren Behebung wollte der Kleine aber nicht mehr Rückwärts fahren, also wurde der Regler nun doch noch gegen eine neuzeitliche Version mit BEC und ohne Relais aus dem Fundus getauscht. Auch der nun überflüssige Empfängerakku wurde ausgebaut, was der Wheelie-Neigung des Funmobils aber keinen Abbruch beschert.
{kind=link}