
mit freundlicher Genehmigung der Redaktion
aus der Zeitschrift
![]() 4/1988
4/1988
SCHLUMPFO 4, Seite 190 (als PDF Datei)
SCHLUMPFO 4
Michael und Volker Frauenstein

Ist hier ein gewassertes UFO, oder nur ein Modell zu sehen?
Ein Ufo auf dem Wasser gelandet? Dieser Eindruck kann ohne Maßstabsbezug leicht entstehen, wenn man sich die Bilder des gewasserten Ufos ansieht. Man stelle sich weiter vor: ein nerviges, auf- und ab-schwellendes, turbinenartiges Pfeifgeräusch und eine permanente, um die Mittelachse ausgeführte Drehbewegung des Ufos mit gleichzeitiger seitlicher Richtungsänderung. Ab und zu blitzen ein paar Laserkanonen auf, begleitet von einem erschreckend lauten Abschußgeräusch, wie man es vom "Krieg der Sterne" her kennt.
Unter einer Glaskuppel ist ein Teil der Besatzung erkennbar, die das Raumschiff - von einer sich entgegengesetzt drehenden Scheibe aus - offensichtlich steuert. Über der Glaskuppel dreht sich eine reflektierende Kugel, die vermutlich als Energiesammler und Sensor benutzt wird.
Sieht man etwas genauer hin, erkennt man aber doch die Besatzung als "Schlümpfe", übrigens eine Idee meines Sohnes. Man hat damit einen vorzüglichen Maßstabsbezug und schon ist auch klar, daß hier kein Ufo, sondern ein gewassertes "Schlumpfo" abgebildet ist. Bei aller Phantasie und Spielerei hatte die Sache aber dennoch einen ernsthaften technischen Hintergrund.
Planung
Wir wollten eigentlich nur einmal den Voith-Schneider-Antrieb, so wie er im Fachhandel erhältlich ist, einsetzen und ausprobieren. Zu diesem Zeitpunkt war uns nicht klar, daß dieser VS-Antrieb leider nur begrenzt wasserdicht ist. Er darf nach unseren Untersuchungen nur ca. 2,0 cm eintauchen, da sonst Wasser durch die Motorachse ins Bootsinnere eindringt.
Versuche, die Achse mittels O-Ring abzudichten, blieben leider erfolglos. Vermutlich ist das auch der Grund, warum so selten ein solcher VS-Antrieb, der zweifellos auch seine Reize hat, auf unseren Gewässern zu sehen ist. Die Leistung des VS-Antriebes ist durch den Mabuchi RS 380 S-Motor fest vorgegeben. Für ein größeres Boot sind daher mind. zwei VS-Antriebe einzuplanen.
Einen Schubbugsierer wollten wir allerdings nicht bauen, wer einmal eine Eigenkonstruktion verwirklicht hat und weiß, wieviel Spaß es macht und wieviel Kreativität freigesetzt wird, der entscheidet sich kaum noch für ein Baukastenmodell. Also machten wir uns Gedanken, den VS-Antrieb in unserer 4. Eigenkonstruktion optimal einzusetzen.
Der VS-Antrieb kann ein Boot auf dem Wasser in alle Richtungen bewegen. Einschränkungen müssen nur durch den Wasserwiderstand des tieferreichenden Bootskörpers mit einkalkuliert werden. Die meisten Bootskörper weisen im Unterwasserbereich keine symmetrische Form auf, da sie ja alle mehr lang als breit sind. Durch den Einsatz eines zweiten VS-Antriebes zieht man sich hier ein bißchen aus der Affäre. Ein optimaler Einsatz gelingt aber nur mit Hilfe eines rotations-symmetrischen Unterwasserkörpers.
Damit war die Idee geboren, eine Art Ufo zu bauen. Nach den Erfahrungen mit mehreren anderen Booten, zumal wenn einige Sonderfunktionen mit einbezogen werden und genügend Fahrzeit vorhanden sein soll, muß mind. mit einem Gewicht von 5-6 kp gerechnet werden. Zur Sicherheit wurde - unserer Meinung nach großzügig - kurz überschlagen:
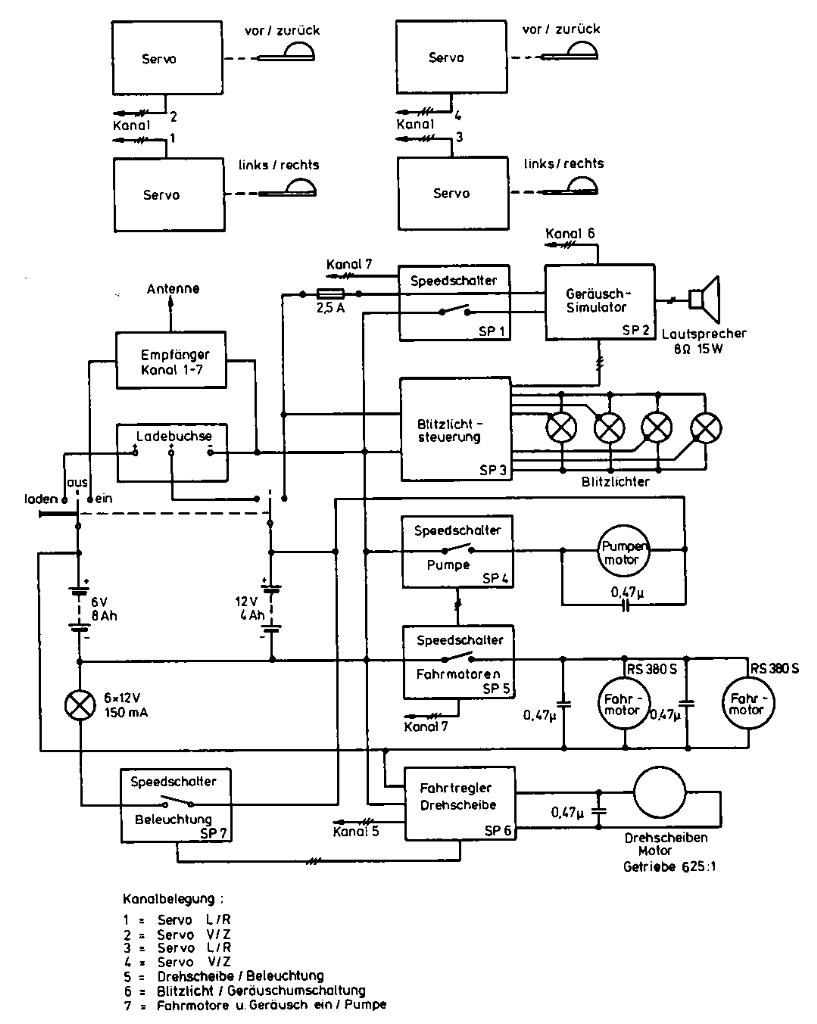
Blockschaltbild
Akkus 4 × 6V/4 Ah = 3,28 kp; Bootskörper 1,5 kp; Sonderfunktionen 1,5 kp; VS-Antrieb 2 × 0,2 kp; zusammen 6,68 kp.
Der Untenwasserkörper mußte also mindestens 6,68 kp Auftrieb erzeugen können. Der Bootskörper sollte aus 4-mm-Sperrholz gebaut werden und einfachheitshalber als Zwölfeck ausgebildet werden, um so der Kreisform möglichst nahe zu kommen. Auf dem Papier entstand dann eine Konstruktionszeichnung, die die äußere Form und die Größenverhältnisse erkennen ließ. Wir versuchten, keinen Platz unnötig zu verschenken, aber durch die beiden VS-Antriebe, die ja im höher gelegenen Teil untergebracht werden mußten, wuchs das Boot auf immerhin 57 cm Durchmesser und auf eine Tiefe im Unterwasserbereich von 8 cm, die Höhe über alles betrug 45 cm. Was wir an Einbauten geplant hatten, das "Drumherum" mußte ja auch stimmen, wurde in einem Blockschaltbild festgehalten. Jetzt konnte endlich mit dem Bau begonnen werden.
Bau
Zwei kleine und zwei große Zwölfeckplatten wurden ausgesägt, es folgten 24 trapezförmige Platten und 12 rechteckige. Die trapezförmigen Platten wurden mit Hilfe von Kreppband zu einem auf dem Kopf stehenden stumpfen Kegel aufgestellt und eine kleine Zwölfeckplatte in der Mitte plaziert. Das Ganze haben wir dann nochmals sauber ausgerichtet und mit einem 2-K-Kleber von innen vorsichtig verklebt. Die außen entstandenen Lücken wurden mit 2- K-Autospachtel bearbeitet und sauber geschliffen.
Die große Zwölfeckplatte mit kleinerem ausgesägtem Zwölfeck kann man nun über den stumpfen Kegel stülpen und ebenfalls verkleben und verspachteln. lnnen überstehende Ränder wurden einfach mit der Schmirgelscheibe sauber weggeschliffen. Zur Verstärkung bringt man innen am Zwölfeckrand Kieferleisten 4 mm × 13 mm kreisförmig an. 4 mm vom Außenrand entfernt wurden 6 mm × 6 mm Kieferleisten aufgeklebt und die 12 Rechteckplatten kreisförmig davor angeordnet, ausgerichtet, verklebt, gespachtelt und ebenfalls sauber geschliffen.

Teile im Rohbau
Der untere Bootskörper war somit fast fertig, es mußten nur die beiden Antriebsflansche in zwei dafür vorgesehene Bohrungen eingeklebt werden, danach wurde der Bootskörper mit Harz (ohne Glasmatten) von außen und innen behandelt.
Das Oberteil entstand in fast gleicher Bauweise, wobei die oberen Ausschnitte für Fenster und Blitzlichter vorher berücksichtigt werden mußten. Mit 4 Befestigungsschrauben befestigt man das Oberteil auf dem Unterteil. Der komplette Bootskörper war an einem verlängerten Wochenende entstanden, einschließlich des Zubehörs wie Drehscheibe und Zwischendeck. Das Zwischendeck sollte sich anfangs auch drehen, aus Platzgründen haben wir es jedoch fest montiert.
Danach wurde alles grundiert und nochmals geschliffen, das Oberteil blaumetallic, das Unterwasserteil rotmetallic lackiert. Die Fenster - oder besser die Raumschiffschleusen - wurden eingebaut (halbschalige Ostereier) und die obere Kugel abnehmbar befestigt, da das Modell sonst nicht im Kofferraum unterzubringen war. Ohne Einbauten wog der Bootskörper knapp über 2 kp. Auf eine Abdichtung zwischen Ober- und Unterteil wurde zunächst verzichtet, sie sollte aber später nachgeholt werden.
Einbauten
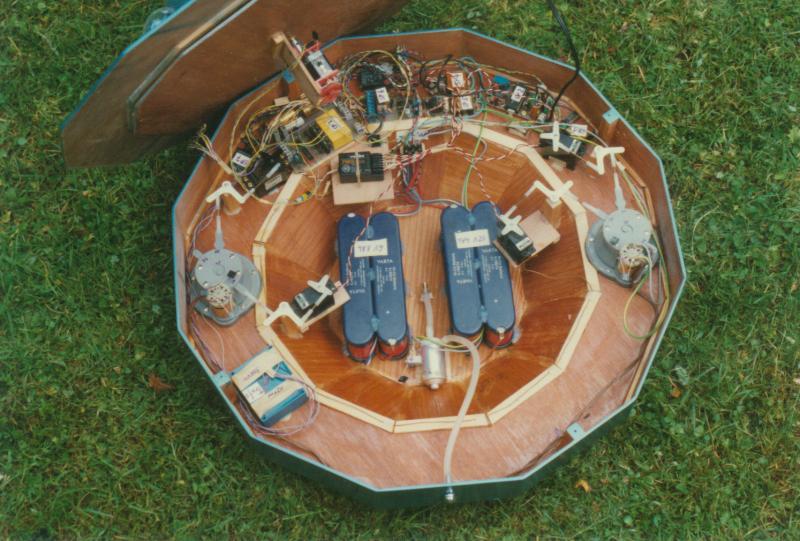
Blick in den Innenraum
Auf dem Foto deutlich zu erkennen sind die beiden VS-Antriebe mit den 4 Servos und den Umlenkhebeln. Die Umlenkhebel wurden nötig, um den vorgeschriebenen 3-mm-Verstellweg des VS-Antriebes nach jeder Seite zu erreichen. Die Stromversorgungsakkus sind als schwerste Bauteile am tiefsten Punkt untergebracht, um den Schwerpunkt so tief wie möglich zu halten. Dann ist noch eine Wasserpumpe erkennbar, die ebenfalls möglichst tief eingebaut wurde, so daß im Ansaugteil kein Luftpolster entsteht.
Weiter ist ein Transformator für die Blitzlichtelektronik erkennbar und eine Menge Kabelgewirr sowie einzelne Elektronikbausteine. Die einzelnen Bausteine und ihre Bedeutung sind im Blockschaltbild erläutert (mit SP1 bis SP7 gekennzeichnet).
Fahrtregler und Speedschalter sind alles bewährte Technik und entstanden an 3-4 Abenden. Ein wenig mehr Zeit verschlang der Geräuschsimulator. Er sollte im 30-40 Sek.-Rhythmus auf-und abschwingen und dabei ein turbinenartiges Pfeifgeräusch von sehr hoher Frequenz bis in den mittleren Frequenzbereich hinein erzeugen. Außerdem mußte - über ein Relais gesteuert - ein kräftiges Laserabschußgeräusch umschaltbar ertönen.
Ein 15-Watt-Verstärker wurde eingebaut, der das Lasergeräusch mit voller Lautstärke wiedergibt, während das Turbinengeräusch nur mit 1/4 Lautstärke arbeitet. Nach Einbau des Simulators hatten wir anfangs Schwierigkeiten durch eingestreute Brummgeräusche. Hier zeigte sich mal wieder, daß alle Geräuscherzeuger sehr empfindlich auf jede Spannungs-Veränderung reagieren und möglichst eine eigene Stromversorgung erhalten sollten.
In unserem Fall war der Fahrtregler mit angeschlossenem Getriebemotor der Übeltäter. Er wurde kurzerhand vom 12-V-Stromkreis auf den 6-V-Stromkreis verbannt und das Problem war beseitigt. Danach benötigte der Drehteller 7 Sek. für eine Umdrehung, das war aber immer noch schnell genug.

Kommandostand mit Besatzung
Das nächste Problem tauchte dann gleich beim Bau der Blitzlichtsteuerung auf. Es sind am Umfang verteilt 4 Blitzlichter eingebaut, die in rascher Folge umlaufend blitzen sollten. Nach einigen Versuchen haben wir dann eine Blitzfrequenz von ungefähr 10 Hz erreicht, etwas schneller hätte es ruhig sein dürfen, aber es dauert eben eine gewisse Zeit, bis genügend Energie an der Blitzlampe aufgebaut ist. 10 Blitze pro Sekunde im Dauerbetrieb sind aber auch nicht schlecht.
Nachdem alles installiert war und ein Funktionstest befriedigend verlaufen war, sprach eigentlich - außer dem Wetter - nichts mehr gegen den ersten Probelauf.
Probelauf
Das fertige SCHLUMPFO wog immerhin etwas mehr als 8,8 kp. Wieder einmal hatten wir uns im Gewicht verschätzt und mit weniger gerechnet.
Ein Badewannentest war bei diesen Größenverhältnissen auch nicht möglich, so mußten wir es eben am See darauf ankommen lassen.
Der äußere Rand tauchte nach dem Einsetzen ins Wasser knapp 2 cm tief ein, lag ziemlich plan und mußte nicht nachgetrimmt werden. Es war fast das Maximum an Tiefgang, das wir uns erlauben durften. Dann wurde eingeschaltet und SCHLUMPFO etwas vom Ufer abgestoßen, um nicht gleich nach Einschalten der VS-Antriebe zu stranden; schließlich hat man durch die Form des SCHLUMPFO keinen Bezug zu "Vorn" oder "Hinten" wie bei anderen Booten.

volle Drehbewegung
Nach dem Einschalten der beiden VS-Antriebe sollte sich SCHLUMPFO vorerst nicht bewegen, was durch etwas Nachtrimmen am Sender auch erreicht wurde. Dann wurde der eine Steuerknüppel auf "Voll voraus", der andere auf "Voll zurück" gestellt, wobei SCHLUMPFO sich mit merklich zunehmender Geschwindigkeit zu drehen begann. Die beiden VS-Antriebe laufen dabei gegensinnig und erzeugen so eine maximale Drehgeschwindigkeit von über 1 U/Sec. Jetzt wurde der eine VS-Antrieb auf neutral gestellt, wobei die Drehbewegung lediglich langsamer wurde. Falls der auf neutral gestellte Hebel in linken Anschlag gebracht wird, entsteht sofort eine Pendelbewegung um einen großen Kreis. Die anschließende Spielerei an den Steuerknüppeln ergab eine ganze Reihe witziger Fahrfiguren. Nach einiger Übung schafft man es sogar, unter Beibehaltung einer permanenten Drehung eine gezielte Richtungsänderung vorzunehmen und das angestrebte Ziel zu erreichen. Selbstverständlich kann SCHLUMPFO auch wie ein normales Boot gesteuert werden, aber dann ist natürlich der Reiz dahin.
Zweifellos war der VS-Antrieb in diesem Modell an der richtigen Stelle eingesetzt, ja man kann schon sagen, daß wir begeistert waren. Die anderen Funktionen wurden natürlich ebenfalls durchgetestet und sorgten gleich dafür, daß sich einige Zuschauer versammelten, die unbedingt wissen wollten, was das denn wäre. Nun, in diesem Fall fiel uns eben nichts Besseres ein, als daß es sich vermutlich um ein auf dem Wasser niedergegangenes Ufo handeln müsse.
Schlußbemerkungen
Bei Sonneneinstrahlung beschlug die Glaskuppel im lnneren durch Kondenswasser, es mußte nachträglich für eine bessere Belüftung gesorgt werden. Ein Blitzlich war ausgefallen, wurde aber wieder repariert, ansonsten sind keine weiteren Pannen passiert. Es war auch kein einziger Tropfen Wasser ins Bootsinnere eingedrungen. Vielleicht vermissen Sie ja eine Antenne, die ist aber im Bootskörper verlegt und reicht vollkommen aus, da man ja mit diesem Modell meistens in der Nähe des Ufers bleibt.

in Normalfahrt
Übrigens, ein Modellbaukollege hatte noch eine Wahnsinns-ldee: das Ufo müßte sich eigentlich einnebeln können! Natürlich arbeiten wir im Moment daran und es wird wohl nicht lange dauern, bis auch das installiert ist. Wir denken dabei an roten Disconebel, der steuerbar aus dem Oberteil austritt.
Es ist ein reines Action-Modell geworden, das uns sehr viel Spaß bereitet und mit dem man fast 2 Stunden Fahrzeit auf dem Wasser verbringen kann.
Die Bauzeit betrug 18 Tage und verschlang etwa 180 Stunden für alles, einschließlich der eingebauten Elektronik. Verbessert werden könnte noch die Steuerung der beiden VS-Antriebe. Der Mensch ist wieder mal das schwächste Glied in der Kette, denn es bedarf schon einiger Übung, gezielte Richtungsänderungen unter Beibehaltung der Drehbewegung auszuführen.
Interessant wäre hier der Einsatz eines programmierbaren Kleinstrechners. Im Modell oder auch im Sender untergebracht, könnte der Rechner sozusagen die beiden VS-Antriebe entsprechend synchronisieren , so daß nur noch mit einem Steuerknüppel gesteuert werden muß.
Hier möchten wir die Elektronik-Fans unter den Lesern ansprechen, das wäre doch eine schöne Aufgabe, die bestimmt auch weitere Anwendungsgebiete abdecken dürfte. Wir würden uns jedenfalls sehr freuen, bald mal etwas in dieser Richtung zu hören oder in SM zu lesen.
M. und V. Frauenstein, Kurfürstenallee 88, 2800 Bremen 1. (Bitte Adresse nicht nutzen, da nicht mehr aktuell)