
TwinProp - Ein RC Kreuzknüppelersatz für zwei parallel zu bedienende Funktionen

TwinProp Umsetzung im RC Sender Robbe Starion
Motivation
Für die Aufrüstung unseres kleinen RC-Segelboots Collie mit einer zweiten Segelwinde für die Fock wollte ich am Sender nicht mit Kanal 2 am rechten Kreuzknüppel arbeiten, da dieser normalerweise ohne Rasterung ist und man daher die Position immer halten muss. Ein 8 Kanal-Sender mit 2 Linearreglern erscheint mir für die 3 Funktionen der Collie dann aber auch wieder überzogen. Eigentlich schwebte mir eine Umbau des Knüppels auf einen Navy Twin Stick vor, wie es ihn für die Robbe/Futaba Sender F-14/FC-16 gibt. Am Ende des Tages war mir die Anschaffung und Einarbeitung in einen 3D-Drucker dann doch zu viel. So habe ich mir eine Lösung mit 4 Schiebepotentiometer überlegt, die sowohl den einen Kreuzknüppel, als auch dessen Feintrimmungen im Sender ersetzen. Meine Wahl für diesen Umbau fiel auf einen Robbe Starion Sender, da er mit 4 Kanälen gut zur Collie passt, er Steckkontakte auf der Platine für die elektromechanischen Bedienelemente hat und mehrfach in unserem Fundus vorhanden ist.
Elektromechanischer Aufbau des Kreuzknüppels im Sender
Die Bewegung des Kreuzknüppels wird ja auf zwei Potentiometer übertragen, die über die Drehbewegung ihre Widerstandsverhältnisse zwischen den drei Kontakten ändern. Dabei sind die Wege der Potentiometer meist nicht voll ausgeschöpft. Auch die Feintrimmung macht nichts anderes, als das Sie das Potentiometer leicht dreht. Wir haben daher 3 Widerstandzonen zu berücksichtigen, die in Summe den vollen Widerstand des Potentiometers ergeben. Einzeln betrachtet ist das der mittlere Bereich, der über die Knüppelbewegung von Vollausschlag bis Vollausschlag erreicht wird (Kreuzknüppelweg). Dazu kommen die zwei Bereiche die über die Vollausschläge der Feintrimmung zusätzlich erreicht werden können. Und Schlussendlich haben wir die zwei Endbereiche in die das Potentiometer nie läuft, die ich hier mal Leerweg nenne. Bei unserer Robbe Starion habe ich durch Widerstandsmessung z.B. folgende Werte erhalten:
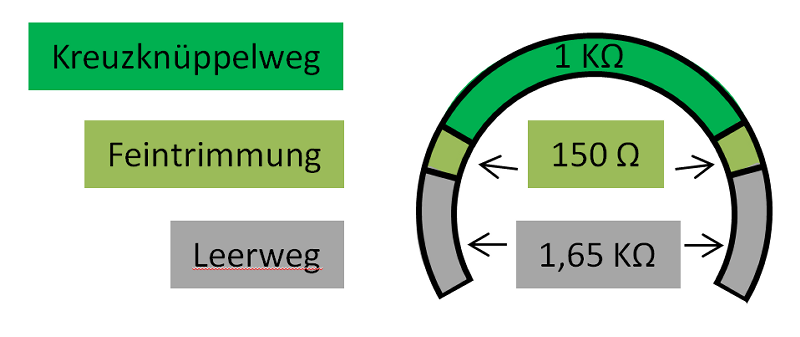
TwinProp: Widerstandswerte Starion
Kreuzknüppelweg: 1 kΩ
Feintrimmung : 300 Ω (2 * 150 Ω)
Leerweg: 3,3 kΩ (2 * 1,65 kΩ)
Die Gegenprobe über den Messwert des Gesamtwiderstandes mit 4,5 kΩ bestätigt die Einzelmessungen. Im Prinzip sind die genauen Werte nicht so wichtig. Wichtig ist, das wir nun wissen welche Spannungsteiler-Verhältnisse der Sender erwartet um die PWM Signale für Vollausschlag zu generieren. Bei unserer Starion ist es also 1/3 (Leerweg pro Seite) zu maximal 1/3 (Nutzweg). Das kann bei anderen Senden deutlich abweichen. Bei allen Sendern ist jedoch gleich, das die Mittelposition immer gleiche Widerstandswerte von Plus zu Signal, wie von Minus zu Signal braucht.
Elektromechanische Umsetzung der Linear-Encoder als Kreuzknüppelersatz
Der Einbauraum für den neuen Enkoder ist vorgegeben, wenn man am Gehäuse nichts verändern möchte um einen Rückbau nicht zu erschweren. Damit war der mögliche Weg für die Schiebepotentiometer mit max. 30 mm vorgegeben. Ebenso ist der Weg für die Feintrimmung mit knapp 25 mm unabänderlich. Da mir nicht nur aus optischen Gründen am Sender die Feintrimmung wichtig war kam ein Schiebepotentiometer als Kreuzknüppelersatz mit 1 kΩ nicht in Frage. Ebenso hab ich mich gegen ein Modell mit Rasterung in der Mittelstellung entschieden, da es mir für die Bedienung der Segelwinden wenig Vorteilhaft erschien. Für die Steuerung eines zweimotorigen Schiffsantriebs mit Drehrichtungsumkehr sähe das z.B. dann schon ganz anders aus.
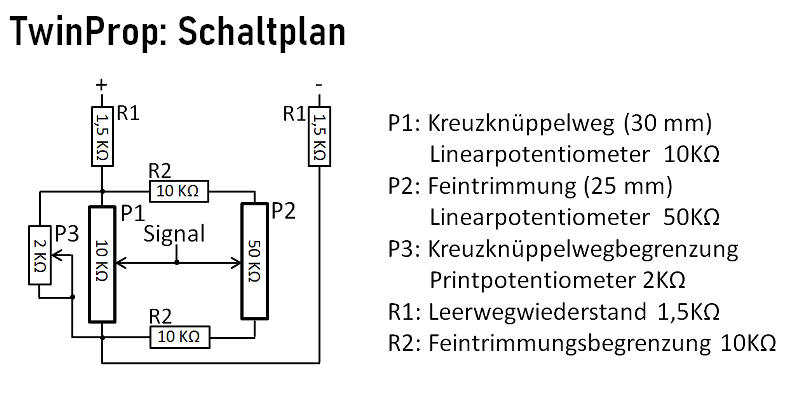
TwinProp: Encoder-Schaltplan
Es wurden also ein Schiebepotentiometer (P1) mit 10 kΩ mit Schiebeweg von 30 mm gewählt. Darauf basierend sind die notwendigen Wiederstände in Reihe (R1 für die Leerwege) und Parallel (R2 + P2 für die Feintrimmung) berechnet worden, um auf die notwendigen Werte wie bei den Kreuzknüppelpotentiometer zu kommen. Der nebenstehende Schaltplan zeigt die Ergebnisse dieser Berechnungen für unseren Starion Sender.
Wir wissen alle, dass eine Servowegbegrenzung am Sender Vorteile hat. Daher habe ich den Parallelwiderstand zur Reduktion des Gesamtwiderstandes des Encoders als Printpoti (P3) gewählt um eine gut Kalibrierung der Auslenkung der Servos über den Sender zu ermöglichen. Für die Feintrimmung habe ich mich für ein 50 kΩ Schiebepotentiometer (P2) mit Mittenrasterung entschieden, das mit 2 Reihenwiederständen (R2) eine ausreichende Wegänderung erzeugt. Die Elektronik des Senders sieht nicht die Widerstandswerte, sondern misst die Spannungen. Daher kommt es nicht auf die exakten Widerstandswerte an, sondern auf die Spannungsteile und somit auf die Verhältnisse der Wiederstände zueinander. Somit fallen meine Leerwegwiederstände (R1) aus der E12 Normreihe etwas kleiner aus, was über die Einstellung des Printpotetiometers (P3) mit maximal 2 kΩ berichtigt wird.

TwinProp: Testaufbau zum Einstellen
Nachdem die Schaltung 2 mal aufgebaut wurde, und man noch Kabel mit Servosteckern zum Anschluss im Sender angelötet hat muss man die TwinProp-Module am Sender noch Einstellen. Die Abstimmung im Sender lässt sich am exaktesten über eine Oszilloskop mit Kenntnis des Protokolls des genutzten RC Systems bewerkstelligen. Das pragmatische Vorgehen ist aber, dass man zwei gleiche Servos an einem nicht umgebauten und einem der umgebauten Kanäle am Empfänger anschließt, einschaltet und die Ausschläge der Servos vergleicht. Man sollte mit allen Potis (P1 bis P3) der Schaltung in Mittelstellung anfangen und den Schieber (P1) etwas in eine Richtung bewegen. Nun dreht man am Printpoti (P3) und prüft den Servoausschlag um die Richtungen zur Reduktion und Zunahme des Weges zu erkennen. Nun weiter mit dem Schieber (P1) bis der Servo in der maximal gewünschten Auslenkung ist. Dann Printpoti (P3) reduzieren, Schieber (P1) weiter Richtung Maximalausschlag bewegen. Das sollte man so lange wiederholen, bis der Endausschlag ohne Änderung an der Feintrimmung (P2) passt. Wenn der Maximalausschlag des Servos nicht erreicht wird, muss das Printpoti (P3) natürlich in die andere Richtung bewegt werden, bis es passt. Die Feintrimmung (P2) braucht nicht kalibriert werde, aber nach dem Einstellen des Endausschlag sollte man den Weg kurz testen.
Aufbau des Modulträger passend zum Sender
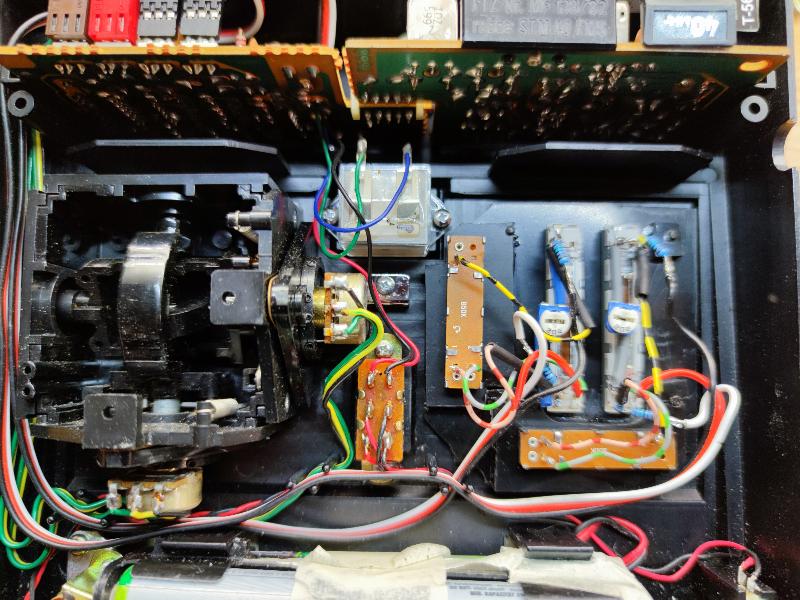
TwinProp: Innenansicht Sender
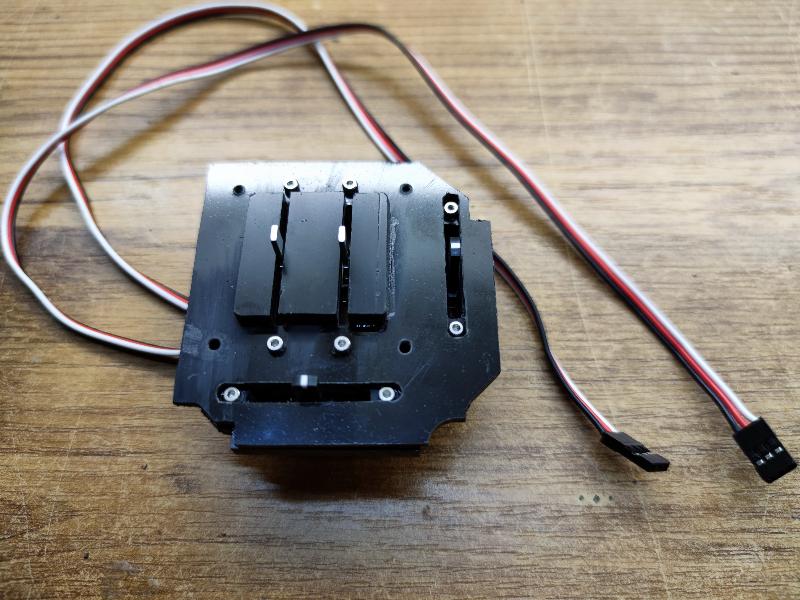
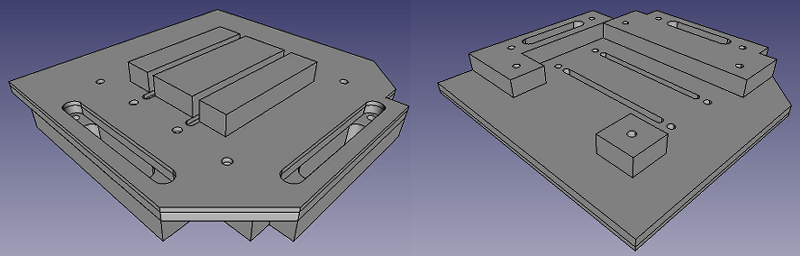
TwinProp: Draufsicht TwinProp Modul
Um die Schiebepotentiometer vernünftig im Sender montieren zu können habe ich einen für den Starion Sender passenden Modulträger entworfen und aus zurechtgeschnittenen und zusammengeklebten schwarzen ABS-Platten aufgebaut. Das FreeCAD Modell des Moduls habe ich noch etwas optimiert nachdem der Bau meines Trägers abgeschlossen war. Das fertig montierte TwinProp Modul lässt sich genauso in das RC Sender Gehäuse einschrauben, wie der originale Kreuzknüppel. So wäre ein Rückbau problemlos möglich, was ich aber nicht erwäge, da mir die Starion mit TwinProp im Zusammenspiel mit unserem Segelboot viel besser taugt.
{kind=link}