
mit freundlicher Genehmigung der Redaktion
aus der Zeitschrift
![]() 11/1983
11/1983
STRAWAP MVF 38, Seite 596 (als PDF Datei)
STRAWAP MFV 38
von Michael und Volker Frauenstein

Jetzt, da alles zu einem Bericht zusammengefaßt ist, kann ich es ja verraten. Das Schlimmste war nicht, ein Modell zu bauen, sondern, daß ich darüber schreiben sollte. In meinem Alter, ich bin 17 und gehe noch zur Schule, hat man zu sowas keine Lust, aber mit ein bißchen Hilfe ist auch das überstanden.
Mit meinem Vater habe ich einige Schiffsmodelle, bisher alles Baukastenmodelle, gebaut. Diesmal sollte es nicht wieder ein Baukasten sein, sondern ein eigener Entwurf.
Planungsüberlegungen
Nach einigem Überlegen stand die Grundidee, eine Art utopisches Amphibien-Fahrzeug, fest. Nun mußten die Randbedingungen festgelegt werden. Es sollte möglichst einfach zu bauen sein, keine allzu große Bauzeit erfordern, gut zugänglich sein, über zwei Räder angetrieben werden und mit den Rädern steuerbar sein.
Zur Stromversorgung sollten drei vorhandene 2-V/10-Ah-Bleibatterien verwendet werden. Als Sonderfunktionen waren zwei Scheinwerfer, Radar, eine drehbare Wasserkanone, ein Diesel- und ein Klar-zum Gefecht-Geräusch vorgesehen. Das Ganze durfte möglichst wenig kosten, also hieß die Devise, fast alles selber machen.
Da nichts ohne Zeichnung bzw. Berechnung läuft, so sagte wenigstens mein Vater, gings daran, einen ersten Entwurf aufs Papier zu bringen. Mit welchem Gewicht war zu rechnen? Also kurz überschlagen:
| Batterien ca. | 1740g |
| Motoren ca. | 400g |
| Getriebe ca. | 100g |
| Elektronik ca. | 300g |
| Fahrzeuggewicht ca. | 400g |
| Sonstiges ca. | 100g |
| _____ | |
| 3040g |
Der Unterwasserkörper mußte somit rund 3 kg verdrängen. Da wir das Modell aus ABS-Platten bauen wollten, war klar, daß es keine Rundungen haben sollte, es konnte lediglich aus einzelnen Platten zu einem Ganzen zusammengesetzt werden. Die Anordnung der einzelnen Platten entstand dann auf dem Papier, dabei wurde darauf geachtet, einfache Winkel zu verwenden und zu harmonischen Proportionen zu gelangen.
Die Antriebsräder sollten im Wasser und an Land möglichst mit gleichem Wirkungsgrad arbeiten, daher wurden zwei Radgeschwindigkeiten eingeplant, wobei wir schätzten, daß an Land etwa 35 cm/sec. und im Wasser ca. 70 cm/sec. ausreichend sein würde. Der Radkörper sollte als Hohlkörper ausgeführt werden und dadurch zum Auftrieb beitragen. Den Vortrieb sollten aufgesetzte Schaufeln besorgen.
Die Lage der Räder ergab sich aus der Überlegung, daß das vom Rad übertragene Drehmoment vom Modellkörper weitgehend absorbiert werden sollte, was in unserem Fall hieß, daß der Massenschwerpunkt möglichst weit von der Antriebsachse des Rades entfernt sein mußte. Mit etwas Fantasie ergibt sich somit fast automatisch die Grundform des Modells. Diese Grundform wurde auch später, bis auf Kleinigkeiten, nicht mehr verändert. Lediglich der Maßstab wurde vergrößert, da die Berechnung des Unterwasserteils nach Festlegung der Wasserlinie nur 2.3 kg Auftrieb ergab. Danach waren es dann 3.3 kg und das erschien ausreichend, zumal die Außenabmessungen immerhin auf eine Breite, einschließlich der Räder, von rund 36 cm und eine Länge von rund 55 cm angewachsen waren. Detailüberlegungen folgten, so wurden von den wichtigsten Teilen wie z.B. den Rädern, den Achsen und Lagern einzelne Teilzeichnungen angefertigt. Der Rest sollte sich beim Bau ergeben.
Die elektrische bzw. elektronische Vorplanung und Ausführung lag weitgehend in den Händen meines Vaters. Er hat zu diesem Zweck ein Blockschaltbild erstellt, aus dem, so glaube ich, gut hervorgeht, welche Ausrüstung und welche Kanalbelegung wir vorgesehen haben. Außerdem konnte dadurch an Ausrüstungsdetails so leicht nichts übersehen werden und es bestand jederzeit eine Übersicht über die noch herzustellenden Blöcke.
Gehäusebau
Die einzelnen Flächen wurden aus 1-mm-ABS-Platten (Grundplatte 2 mm) hergestellt. Auf die Grundplatte wurden 5x5-mm-Kieferleisten geklebt. Leider verwendeten wir hierzu Hartkleber, der, wie sich später herausstellte, keine feste Verbindung lieferte oder es lag daran, daß wir Hart-PVC-Platten erwischt hatten. Am besten eignet sich, wie einige Klebeversuche zeigten, hierzu Speedkleber. Die Seitenplatten und die Deckplatte wurden angeklebt. Nach kurzer Zeit war das Grundgehäuse entstanden. Im Prinzip also ein Kieferleistengerüst mit aufgesetzten einzelnen Platten, welches auch ohne spezielle Verstrebung schon einen sehr stabilen Eindruck machte. Die inneren Flächen wurden mit Schmirgelpapier aufgeraut und mit Zweikomponentenkleber eine Hohlkehlklebung von innen aufgebracht.
Nach dem Verschleifen der äußeren Kanten wurde von außen der Spalt im Bereich der aneinanderstoßenden Platten mit Speedkleber verschlossen. Das Turmgehäuse wurde auf die gleiche Weise erstellt und später klappbar, mittels zweier Scharniere, auf dem Grundgehäuse befestigt.
Die Dichtigkeit zwischen Turmgehäuse und Grundgehäuse wurde durch Siliconkautschuck, den wir einseitig am Rahmen des Turmgehäuses aufbrachten und den Gegenrahmen des Grundgehäuses mit Trennmittel (Fett) bestrichen, hergestellt. Das führte im weiteren sogar dazu, daß eine zusätzliche Entlüftung notwendig wurde.
Schaufelrad

STRAWAP an Land . . .
Die Schaufelräder bestehen im wesentlichen aus einem 80 mm breiten, 150 mm durchmessenden PVC-Rohrstück, auf welches von jeder Seite eine 1-mm-Aluminiumscheibe aufgeklebt ist. Die Scheiben erhielten, am Umfang verteilt, jeweils 12 Nuten eingefeilt, in die später die Schaufeln mit aufgesetzten Gummistreifen eingeklebt wurden (5x15-mm-Kieferleisten). Als Radachse benutzten wir 4-mm-Rundstahl, auf den wir eine 1,5 mm dicke Stahlscheibe (ø 50 mm) hart auflöteten. Die Achse wurde nun durch die mittlere Bohrung des Rades geschoben, und die Stahlscheibe mit der Aluminiumscheibe des Rades, einschließlich Achse, mit Zweikomponentenkleber dicht verklebt. Die relativ große Flächenverklebung zwischen Achse und Rad sollte somit imstande sein, das entsprechende Drehmoment auch auf das Rad zu übertragen.
Einbauten

. . und im Wasser in Aktion
Im unteren Gehäuse wurden die Getriebemotoren eingebaut, gleich dahinter sitzt die Antriebselektronik auf einer einschiebbaren Grundplatte. Danach folgt das herausnehmbare Pumpenmodul mit Wassertank, links davon der Empfänger, anschließend die Antriebsbatterien im hinteren Teil. Im Turmteil wurden die beiden Scheinwerfer, einschließlich des Zusatzakkus, die Wasserkanone (durch Servo drehbar), der Radarantrieb, der Lautsprecher und die Geräuschelektronik sowie von außen zugänglich der Ein/Aus-Schalter und die Ladebuchse untergebracht. Im Detail möchte ich hier nur auf die auch für andere Modellbauer vielleicht interessanten Dinge eingehen. So wurden z.B. die beiden Radarantennen aus einem halbierten Tischtennisball hergestellt. Der Radarantrieb ist ein altes Spielzeugauto mit Allradantrieb gewesen, von dem das Chassis einschließlich 1,5 V Motor verwendet wurde. Die Wasserkanone ist aus verschieden dicken Rohren zusammengeklebt. Schwierigkeiten gab es bei der Beschaffung der passenden Zahnräder für den Radantrieb, aber schließlich wurden welche aus einem Stabilbaukasten verwendet. Die hintere Kugel soll ein Unterwasser-Sonar darstellen. Sie trägt zum Auftrieb bei und ist mit dem hinteren Rad fest verbunden, so daß sie je nach hinterer Radstellung mitgedreht wird. Übrigens, die Kugel stammt von einer alten Babyrassel.
Zum Thema Elektronikausrüstung kann ich nur sagen, daß ich dauernd am Rennen war, um für meinen Vater elektronische Teile zu beschaffen. Ansonsten hörte ich ihn ab und zu im Bastelkeller fluchen, aber nach 2 Wochen hatte er es geschafft, die einzelnen Blöcke lagen zum Einbau bereit.
Der Einbau und die Lackierung (anthrazit-grünlich-metallic) verschlangen dann noch mal ein Wochenende, aber dann war es soweit, die erste Probefahrt konnte beginnen.
Probelauf
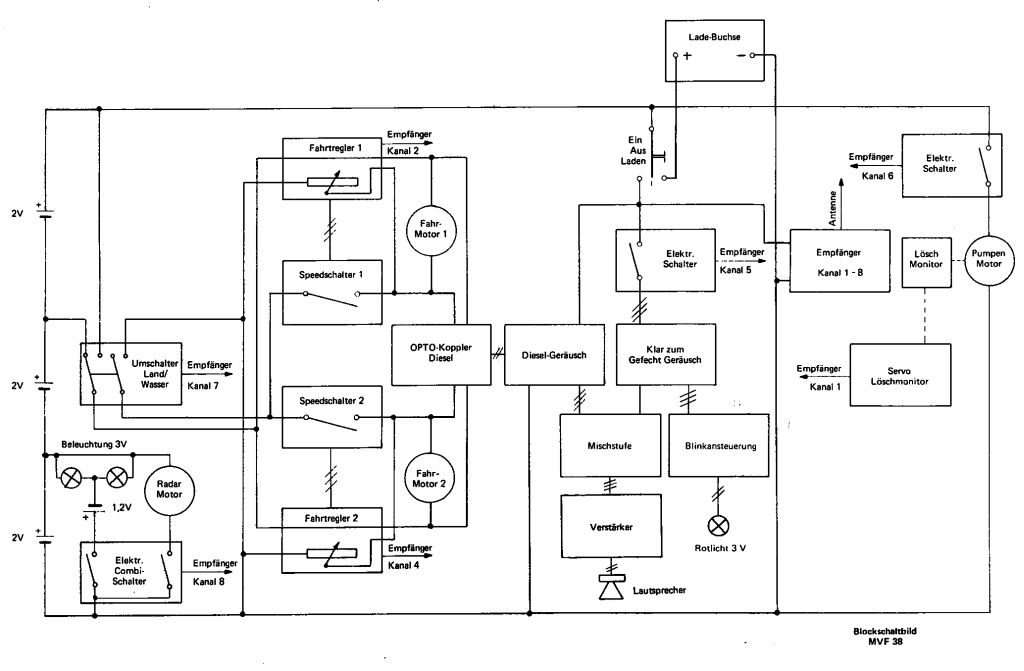
Blockschaltbild
Vor dem Probelauf stand natürlich eine Gewichtsüberprüfung. Donnerwetter, 4,2 kg zeigte die Waage, fast 1 kg mehr als geplant! Das würde sich auf die Eintauchtiefe im Wasser auswirken. Aber noch waren wir an Land, also einschalten. Das Dieselgeräusch ertönte, nach meiner Schätzung mindestens ein 20-Zylinder. Scheinwerfer ein, danach Radar ein und Löschkanone drehen, es funktionierte alles. Landgeschwindigkeit war programmiert, also beide Steuerknüppel vor, und das Fahrzeug bewegte sich. Nach kurzer Gewöhnung hatte ich es voll im Griff. Es ist ordentlich wendig durch die beiden unabhängig voneinander angetriebenen Räder, kann praktisch auf der Stelle drehen, wenn der eine Steuerknüppel auf vor, der andere auf zurück steht. Das Dieselgeräusch nimmt an Drehzahl zu, wenn einer der beiden Antriebsmotoren läuft. Das Geräusch - Klar zum Gefecht - klingt sehr echt und durchdringend und kann jederzeit separat dazugeschaltet werden. Die Überprüfung der Geschwindigkeit ergab 4 m in 11 sec. (36 cm/sec.), fast wie unser geplanter Wert.
Nach Umschalten auf die Wassergeschwindigkeit wurde das Fahrzeug deutlich schneller, im Grunde zu schnell für einen geschlossenen Raum, also ab in den Garten und dort weiter probiert. Auf dem weichen Rasen konnte man damit die volle Geschwindigkeit (61 cm/sec.) ausnutzen, aber auf Betonpflaster nicht, da die einzelnen Schaufeln das Gefährt ganz schön in Vibration brachten. Zurück zur Landgeschwindigkeit und einem Steigungstest.

Grössenvergleich
Dabei schaffte das Fahrzeug ca. 30° Steigung auf glatter Fläche ohne abzurutschen. Mit dem ersten Probelauf konnten wir voll zufrieden sein. Also nur Mut und gleich den Übergang zum Wassertest gewagt, aber da wurde ich mal wieder gebremst, es sollte erst mal ein Badewannenversuch sein. Durch das größere Gewicht war die Wasserlinie rund 1 cm höher als geplant. Bis zu den Radachsen waren noch 2.5 cm Abstand zum Wasser vorhanden und da diese mit Gummitüllen gedichtet waren, bestand wohl keine Gefahr. Der Körper und die Räder waren ebenfalls dicht. Dann probierten wir die Pumpe für die Löschkanone.
Die drehte sich zwar, aber es kam kein Wasser. Die Antriebsräder drehten, es hörte sich wie bei einem Schaufelraddampfer an, und der Vortrieb schien auch ausreichend. Das Pumpenmodul wurde ausgebaut und untersucht. Wir hatten eine Kreiselpumpe verwendet, die außerhalb des Wassertanks befestigt war. Der Pumpenabgang war nach unten gelegt. So ein Schwachsinn! Es bildete sich ein Luftsack, den die Pumpe nicht auflösen konnte. Daraufhin wurde das ganze Modul neu erstellt und die Pumpe in den Tank verlegt. Dann endlich funktionierte die Sache, und wir konnten schließlich zum Wassertest übergehen.
Wir suchten eine seicht abfallende Stelle, so daß wir vom Land direkt ins Wasser fahren konnten. Es klappte ausgezeichnet. Im Wasser wurde umgeschaltet, und das Fahrzeug erreichte 28 cm/sec. Geschwindigkeit, wobei die Schaufeln ordentlich mit Wasser um sich spritzten. Den gleichen Wirkungsgrad (36 cm/sec.) haben wir im Wasser nicht erreicht. Vielleicht hätten 2V mehr Spannung den gewünschten Effekt gebracht, aber aus Platzgründen konnten wir das nicht probieren. Bei Vorwärtsfahrt wurde der hintere Teil etwa 1.5 cm tiefer, bei Rückwärtsfahrt 1.5 cm höher aus seiner Normallage gedrückt, was übrigens bei Rückwärtsfahrt dem hinten eingebauten Lautsprecher sehr entgegenkam. Durch die Massenträgheit des Fahrzeugs im Wasser spielte sich alles ein wenig langsamer ab. Trotzdem war auch hier die Wendigkeit erstaunlich. Es konnte praktisch, wie auch an Land, auf der Stelle gedreht werden. Die Wasserkanone funktionierte jetzt auch und erreichte knapp 3 m Spritzweite. Der Übergang vom Wasser aufs Land ergab keine Probleme. Lediglich mußte kurz vor Landberührung auf Landgeschwindigkeit umgeschaltet werden. Der überraschende Effekt ist natürlich, daß man auch an Land die Wasserkanone durch den eingebauten Tank (ca. 150 cm³) benutzen kann. Zum Tanken fährt man einfach wieder ins Wasser und automatisch wird nachgefüllt.
TECHNISCHE DATEN:
| Abmessungen | |
| Breite | 36 cm |
| Länge | 55 cm |
| Höhe | 22 cm (ohne Antenne) |
| Gewicht | 4,2 Kg |
| Stromversorgung | 3 x 2 V / 10 Ah |
| Antrieb | 2 x Monopern Super 6 V |
| Getriebe | Pile 36:1 |
| Gesamtübersetzung | 82:1 |
| Geschwindigkeit | Land 36 cm/sec. bzw. 61 cm/sec. Wasser 28 cm/sec. |
| Steigfähigkeil | ca. 30° |
| Einsatzzeit | 2 Stunden |
Schlußbemerkungen
Sicher werden sich schon einige Leser gefragt haben, was bedeutet eigentlich STRAWAP MVF 38. Die Lösung ist ganz einfach:
STRAWAP steht für Straßenwasserpanzer. MVF sind die Anfangsbuchstaben unserer Namen bzw. unseres Familiennamens. Die Nummer 38 bedeutet 38 Tage Bauzeit (ca. 180 Stunden). Alles in allem hat es sehr viel Spaß gemacht, STRAWAP zu bauen. Auf jeden Fall mehr, als hätten wir uns wieder für ein Baukastenmodell entschieden. Teilweise ist ein Eigenbau sogar leichter, da man nicht im Detail an feste Pläne gebunden ist und seiner Fantasie freien Lauf lassen kann. Vielleicht versuchen Sie es auch einmal mit einer Eigenentwicklung, aber planen Sie ruhig ein wenig größeren Einbauraum ein, man braucht ihn größer als man denkt!