
mit freundlicher Genehmigung der Redaktion
aus der Zeitschrift
![]() 9/1988
9/1988
FLUTOR 5, Seite 484 (als PDF Datei)
FLUTOR 5
Michael und Volker Frauenstein
Flutor als Rennboot
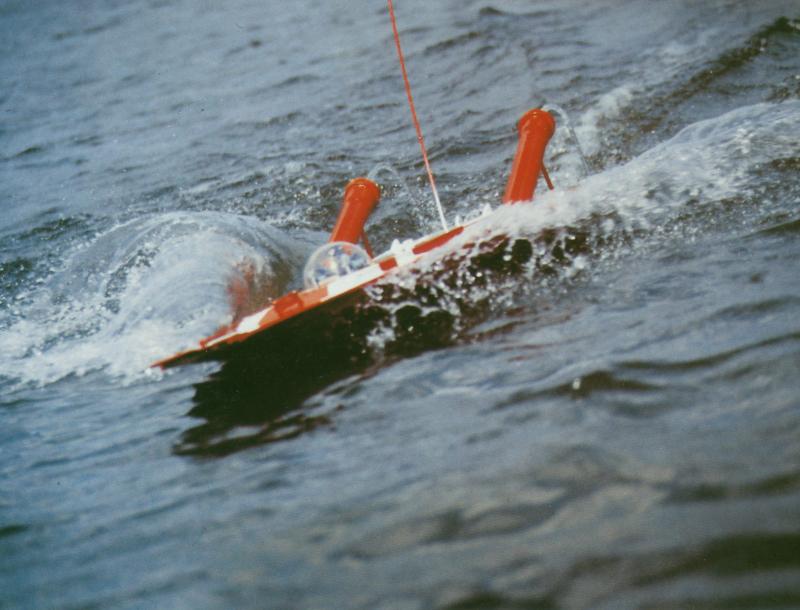
Skeletor ein Wesen aus einer Science-Fiction-Welt, sitzt unter einer Glaskuppel in seinem Fahrzeug FLUTOR 5 und steuert einen auf den ersten Blick merkwürdigen Kurs: Er taucht mit seinem Fahrzeug wie mit einem U-Boot unter, um dann aber mit zunehmender Geschwindigkeit an die Wasseroberfläche durchzubrechen. An der Oberfläche verhält sich das Fahrzeug dann rennbootartig, wobei aus den beiden Auspuffrohren Wasser ausströmt.
Daß dies nicht etwa die Einleitung zu einer neuen Science-Fiction-Story ist, sondern ganz konkrete Vorüberlegungen zu unserer 5. Eigenkonstruktion waren, wird sich bald zeigen. Fehl- und Rückschläge wollen wir dabei auch nicht verschweigen, denn bekanntermaßen kann hieraus am meisten gelernt werden.
Planungsüberlegungen
Die Frage, wie das Boot denn nun aussehen sollte, das sowohl als U-Boot wie auch als Rennboot laufen sollte, ergab sich dann aus folgenden Überlegungen: Ein Rennboot hat im allgemeinen wenig Tiefgang, es muß daher sein ganzes Gewicht auf eine relativ große Auftriebsfläche verteilen. Man erreicht dadurch, daß ein Rennboot bei entsprechender Motorisierung schnell seinen erwünschten Fahrzustand - nämlich den des Gleitens - einnehmen kann. Ein U-Boot dagegen ist meistens lang und schlank gebaut, mit relativ viel Tiefgang. Es ist als reines Verdrängungsboot mit möglichst geringer Stirnfläche konstruiert.

Flutor abgetaucht
Beide Bootstypen trennen offensichtlich konstruktive Welten, trotzdem wollten wir versuchen, einen Kompromiß zu finden. Warum sollte ein Rennboot, wenn es genügend abgedichtet ist, nicht auch bei Unterwasserfahrt als Verdränger laufen können? Dazu müßte es nur genügend schwer sein, und der Restauftrieb müßte mittels geeigneter Tiefenruder dynamisch überwunden werden.
Die Form des Bootes sollte eine im Zusammenspiel mit der Geschwindigkeit unterstützende Wirkung auf den Abtauchvorgang, aber auch auf den Auftauchvorgang ausüben. Ein kräftiger E-Motor war also eine wichtige Voraussetzung.
Damit waren die wesentlichen Randbedingungen abgesteckt, und die Konstruktion im Maßstab 1:1 konnte beginnen. Wir rechneten mit ca. 8-9 kg Fertiggewicht, davon für Akkus ca. 4-5 kg, für den Bootskörper 2,5 kg und für Sonstiges ca. 1,5 kg. Nach mehreren schlechten Erfahrungen hinsichtlich des Fertiggewichtes wollten wir zur Sicherheit einen Bootskörper konstruieren, der mind. 12 kp Auftriebskraft erzeugen konnte. Das Boot sollte aus 4-mm-Sperrholz erstellt werden und möglichst einfach und schnell zu bauen sein. Wir haben den Bootskörper spantenlos konstruiert, wobei sich der Bootskörper lediglich aus sieben einzelnen Sperrholzplatten zusammensetzt. Die endgültigen Abmessungen wurden nach einigen Verdrängungsberechnungen gefunden. Die Hauptabmessungen betragen: 1 m Länge, 0,5 m Breite und 7 cm Tiefe am Spiegel. Die Wasserlinie sollte so verlaufen, daß vorn ca. 5 mm und hinten ca. 15 mm Bootsüberstand erreicht werden. Als besonderen Gag haben wir zwei Auspuffrohre vorgesehen, die zum Unterwasserteil hin offen sind und die bei Überwasserfahrt durch ihre Schrägstellung hinten Wasser ausstoßen sollten. Eine große Klappe im Oberteil sollte für eine gute Zugänglichkeit sorgen, so daß alle Einbauteile problemlos unterzubringen sind.
Bau
Die Zeit zwischen Weihnachten und Neujahr nutzten wir für den Bau. Unsere Werkstattausstattung ist eher bescheiden, außer dem üblichen Werkzeug besitzen wir lediglich eine Stichsäge und eine Bohrmaschine mit Bohrständer und Schleifteller. Diese Grundausstattung ist aber durchaus ausreichend, um Modellbau in dieser Form betreiben zu können.
Zunächst wurden die Abmessungen der sieben einzelnen Platten vom Plan auf die Sperrholzplatten übertragen, diese anschließend ausgesägt und mit der Schmirgelscheibe die Schnittflächen grob geglättet.
In die obere Decksfläche ist eine große Decksöffnung eingeschnitten. Die Decksfläche wurde plan hingelegt und der Spiegel mit wasserfestem Holzleim angeklebt, wobei eine im Innenteil angebrachte Dreiecksleiste für zusätzlichen Halt und den nötigen 90°-Winkel sorgte. Die einzelnen Bodenplatten sind gemäß ihrer Einbaulage an den Enden entsprechend winklig zugeschliffen, gegenseitig angepaßt und ebenfalls mit Holzleim aufgeklebt.
Für die nötige stabile Ausrichtung der Platten bis zum Abbinden des Klebers sorgten entsprechend viel Kreppklebeband sowie untergelegte Abstandstücke. Die Klappe für das Oberteil wurde ausgesägt und mit 10 mm × 10-mm-Leisten innen umlaufend verstärkt, danach konnte der Ausschnitt für die Plexiglaskuppel eingearbeitet werden. Die obere Decksfläche haben wir im Bereich der Klappe entsprechend mit 10 mm × 15-mm-Leisten verstärkt und die Klappe so angepaßt, daß die beiden hinten angebrachten Scharniere ein leichtes Offnen der Klappe gewährleisten. Noch offene Ritzen im Bootskörper wurden mit 2 K-Autospachtel geschlossen, danach wurde alles sauber verschliffen. Die Ausschnitte für die beiden Auspuffrohre wurden nachträglich großzügig eingearbeitet und die Auspuffrohre (übrigens normale PVC-Abflußrohre, innen 30 mm Ø) schräg von hinten im Winkel von ca. 30° eingesteckt. Mit 2K-Kleber sind die Rohre fixiert. Nach dem Aushärten des Klebers saßen die Rohre aber leider nicht fest und konnten leicht nach hinten herausgezogen werden. PVC mit Holz wasserdicht zu verkleben ist fast so gut wie ausgeschlossen, wie einige Klebeversuche gezeigt haben. Außer Silicon-Kleber hielt nichts, der ist aber leider zu elastisch, um in diesem Fall verwendet werden zu können. Es mußte uns also etwas einfallen, um den Bootskörper trotzdem dicht zu bekommen.

kraftvolles Anfahren
Im Bereich der durchgesteckten PVC-Rohre haben wir daher innen den Bootskörper mit fest verklebten Holzbrettchen einfach abgeschottet. Diese Abschottung wurde dann mit PU-Hartschaum ausgeschäumt. Nach Aushärten des PU-Schaumes saßen dann die Rohre fest, was aber weniger auf die Klebewirkung des PU-Schaumes zurückzuführen war (er hält nämlich auch nicht auf PVC), sondern darauf, daß der PU-Schaum das PVC-Rohr so fest umspannt, als wäre es in einen Schraubstock eingespannt. Die unten überstehenden PVC-Rohre konnten jetzt abgesägt und plangeschliffen werden. Kleinere Ritzen an den Stoßstellen der Rohre wurden mit 2K-Autospachtel abgedichtet und verschliffen. Zur Sicherheit gegen Zug und Druck sind die Auspuffrohre mit jeweils einem 6-mm × 1 - Rundstab am Spiegel abgestützt.
Jetzt konnten die Antriebswelle (kugelgelagert) und die Rohre für die Tiefenruden Seitenruder sowie für die Wasserkühlung von Motor und Leistungsendstufe des Fahrtreglers eingebaut werden. Danach wurde der Bootskörper innen und außen mit Epoxidharz gestrichen, das gibt dem Bootskörper die nötige Endfestigkeit und schützt das Holz vor Wassereinbruch. Dank der einfachen Konstruktion haben wir zum Bau des Bootskörpers lediglich 4Tage einschließlich der erforderlichen Endschleifarbeiten benötigt.
Einbauten
Ein kräftiger 12-V-Motor vom Schrottplatz - er versah ehemals als Lüftermotor seinen Dienst - wurde fluchtend zur Antriebswelle mit Silicon-Kleber eingesetzt. Zur späteren Kühlung des Motors hatten wir zuvor ein 4-mm-Alurohr fest um den Motor gewickelt und verklebt. Eine starre Verbindung zwischen Motor und Antriebswelle ist trotz der elastischen Lagerung des Motors in Silicon nicht zu empfehlen. Obwohl ein einwandfrei fluchtendes Verbindungsrohr eingebaut war entstanden Vibrationen und Laufgeräusche, die wir erst beseitigen konnten, nachdem das Verbindungsrohr durch eine Powergrip-Kupplung (siehe SM 11/87) ersetzt worden war.
Zunächst war vorgesehen, den Motor mit 24 V zu betreiben. Wir hatten keine Daten über den Motor, aber Probeläufe im Leerlauf führten zu keiner nennenswerten Enrwärmung, und die Drehzahl sah auch ganz vernünftig aus. Die 4 Akkupacks (je 6V/4Ah) wurden nun im Bootsinneren so angeordnet, daß Platz für zwei weitere 6V/4Ah-Packs frei blieb und daß alle Servos und die Elektronikteile entsprechend Platz finden konnten. Der Schwerpunkt wurde so gelegt, daß er sich bei einer Nachrüstung nicht wesentlich verschieben würde. Das Seitenruder und die beiden unten, etwa mittig angebrachten Tiefenruder wurden eingebaut. Die Ruder sind Kaufteile, die mittels O-Ring abgedichtet sind. Es folgte der Einbau der 3 Servos mit Kugelkopfgestänge, um die Winkelverschiebungen beim Verstellen der Servos entsprechend ausgleichen zu können.
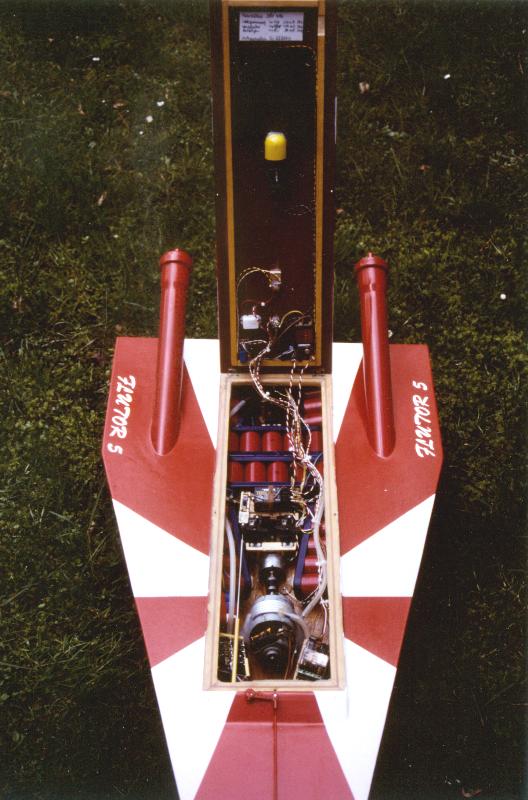
Blick ins Innere
Der Fahrtregler ist nahe dem Motor eingebaut, wobei sein Leistungsteil separat auf einem mit Kühlwasser durchströmten Kühlkörper untergebracht ist. Der Kühlwassereinlauf war im vorderen Drittel des Bootes unten mittig angebracht, um möglichst kurze Kühlwasserwege zu erhalten. Siliconschläuche fanden als Verbindungsschläuche Verwendung, sie sollten aber wenigstens 3 mm Innendurchmesser haben, damit auch genügend Kühlwasser hindurchfließen kann. Das Kühlwasser sollte zunächst den Leistungsteil des Fahrtreglers kühlen, dann den Motor und schließlich hinten am Bootsende als sichtbarer Wasserstrahl austreten. Anschließend wurde die Verkabelung durchgeführt, wobei unbedingt auf entsprechende Dimensionierung der Kabel zu achten ist. Für sämtliche Leistungsverkabelung, hierzu zählen die Leitungen zwischen Fahrakkus, Motor und Fahrtregler verwenden wir mind. Querschnitte von 1,5 mm², wobei auch auf möglichst kurze Verbindungen geachtet werden sollte. Die sonstige Verkabelung ist mit mind. 0,24 mm², besser noch mit 0,5 mm² vorzunehmen, da bei längeren Leitungen und kleinerem Querschnitt doch schon Spannungsabfälle auftreten, die sich störend bemerkbar machen.
Nachdem alles eingebaut und verkabelt war, wurde das Boot mit Grundierfarbe gespritzt und anschließend die Glaskuppel mit Silicon eingeklebt. Die obere Decksklappe haben wir mit Fett eingerieben, am Decksrand Silicon aufgetragen und die Klappe zugeklappt. Das außen austretende Silicon wurde vorsichtig entfernt. Nach dem Aushärten wurde die obere Decksklappe gewaltsam geöffnet und das Fett entfernt. Drei Holzschrauben sollten die Decksklappe dicht mit dem Bootskörper verschließen, mehr Schrauben wollten wir nicht verwenden, um eine schnelle Zugänglichkeit zu ermöglichen. Der erste Dichtigkeitsversuch fiel allerdings negativ aus, und wir überlegten schon, weitere Holzschrauben zu verwenden, aber schließlich kam doch noch die Erleuchtung: Wir hatten die Klappe während des Aushärtungsprozesses des Silicons nur leicht angedrückt und nicht mit den drei Schrauben fest angezogen. Beim Festdrehen der 3 Schrauben entstand dann ein Verformungsdruck auf die Klappe, der nicht mehr durch das bedingt elastisch ausgehärtete Silicon aufgefangen werden konnte. Das Silicon wurde daher entfernt und die ganze Prozedur wiederholt, diesmal mit angezogenen Schrauben. Danach war der Bootskörper dicht.
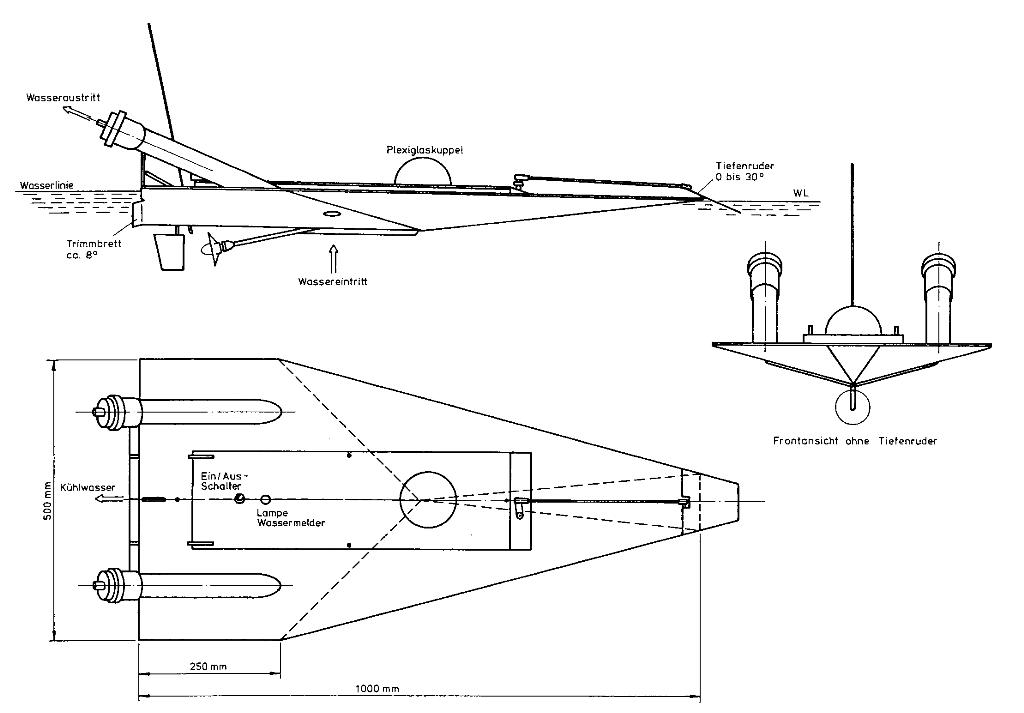
Technische Zeichnungen
Ein weiterer Rückschlag trat dann bei ersten Trockenprobeläufen auf. Die Endstufe des Fahrtreglers war im Parallelbetrieb mit zwei Endtransistoren ausgerüstet, die jeweils max. 15 A verkraften konnten, zusammen also ca. 20-30 A, sofern sie entsprechend gekühlt werden. Die beiden Endtransistoren wurden offensichtlich mit der Leistung des Motors nicht fertig und gaben ihren Geist auf. Der Motor bleibt jedoch in diesem Fall keineswegs stehen, sondern läuft mit voller Geschwindigkeit weiter; da nutzt auch kein Abschalten des Empfängers, der Motor läuft trotzdem weiter und ist nur durch Abtrennen des Fahrakkus zu bremsen. Da wir schon einmal auf diese Art ein Rennboot verloren haben - es ist gegen eine Mauer geknallt und hat sich in seine Bestandteile aufgelöst -, entschlossen wir uns, einen ferngesteuerten Notausschalter zu installieren, der die Akkus vom Motor trennt. Die Endstufe des Fahrtreglers wurde nun auf moderne MOSFET-Leistungstransistoren umgestellt, zur Sicherheit haben wir mehrere im Parallelbetrieb eingesetzt, danach klappte die Sache - zumindest im Trockenbetrieb.
Das Boot wog jetzt in dieser Ausstattung 8,65 kg. Bis zum vollständigen Untertauchen mußten wir ca. 6 kg (Restauftrieb) Blei dazulegen, das heißt, das Boot hatte letztlich einschließlich der Aufbauten eine Verdrängung von ca. 15 kg, bevor es absank. Um die angestrebte Wasserlinie zu erreichen, wurde im Bug ein Bleigewicht von 1 kg entsprechend plaziert. Mit dem Wetter hatten wir Glück, und so konnte die erste Probefahrt Anfang Januar erfolgen.
Probeläufe
Um es vorwegzunehmen, der erste Probelauf verlief schlicht deprimierend. Das Boot erreichte einfach keine Geschwindigkeit, aus den beiden Auspuffrohren strömte zwar hinten wie beabsichtigt Wasser aus, aber es war als eher kläglich zu bezeichnen. Die Wasserkühlung des Motors und des Fahrtreglers schien auch nicht zu funktionieren, da hinten aus dem Endrohr kein Wasser austrat. Das Boot lag hinten bei "voller Fahrt" tief im Wasser und wurde vorn stark herausgedrückt. Die Tiefenruder zeigten fast keine Wirkung, das Boot wurde lediglich noch langsamer und dabei vorne etwas abgesenkt. Die Tiefenruder konnten aber auch als Querruder angesteuert werden, das heißt, das Boot sollte sich mittels der Querruder in die Kurve legen; dabei zeigt das eine Tiefenruder nach oben und das andere nach unten. Aber auch das funktionierte nur bedingt, wobei deutlich eine abbremsende Wirkung auf die Bootsgeschwindigkeit festgestellt werden konnte. Beim Abbremsen (Umschalten auf Rückwärtsfahrt) brannten dann die Kontakte des Umschaltrelais fest, und das Boot konnte nur noch in Rückwärtsfahrt geborgen werden. Auch der Geradeauslauf war unbefriedigend. Einen kleinen Trost hatte die Sache aber dennoch für uns bereit: Beim Rückwärtsfahren wurde das Boot voll unter Wasser gezogen, der Motor schaffte es also, das Boot zu "versenken".
Das anschließende Öffnen der Klappe war der spannende Augenblick, es war kein Tropfen Wasser eingedrungen! Die Glaskuppel war stark beschlagen, hier mußte unbedingt etwas gegen das auftretende Kondenswasser getan werden. Der Fahrtregler war schnell repariert, und am nächsten Tag startete die nächste Probefahrt mit leider den gleichen Ergebnissen; auch hier war wieder das Umschaltrelais ausgefallen, und ein Modellbau-Kollege mußte uns mit seiner ferngesteuerten Ente in einer Rettungsaktion ans Ufer bugsieren. So hatte die Sache also keinen Sinn, es mußten umfangreiche Änderungen vorgenommen werden, aber zunächst war zu analysieren, was eigentlich nicht stimmte.
Das erste war der Fahrtregler. Warum brannten die Relaiskontakte beim Umschalten fest? Vermutlich deshalb, weil nicht genügend Totzeit zwischen Umschalten und erneutem Motoranlauf vorhanden war. Ein größerer Kondensator und ein neues Relais beseitigten dann das Problem, die Totzeit wurde auf das doppelte vergrößert. Das Relais schaltet jetzt sozusagen ohne Last um, vorausgesetzt man stellt den Steuerknüppel nicht zu schnell von Vor- auf Rückwärtsfahrt.
Das zweite Problem war daß die Tiefen- oder Querruder so gut wie keine Wirkung zeigten. Diese wurden daher kurzerhand ausgebaut, die Öffnungen plangeschliffen, verklebt und verspachtelt. Es mußte ein größerer Hebelarm auf das Boot wirken, um es unter Wasser drücken zu können. Wir hatten die Tiefenruder fast im Schwerpunkt angebracht und so überhaupt keine Hebelwirkung erzielen können. Nun wurde ganz vorn ein Tiefenruder angebracht, um so den größtmöglichen Hebelarm auszunutzen. Das Tiefenruder ist aus 1,5-mm-Alublech hergestellt und über ein entsprechendes Gestänge mit den im Bootsinneren installierten Servos verbunden. Die beiden Servos arbeiten synchron über ein V-Kabel und sind über ein Gestänge mechanisch gekoppelt, um so eine größere Kraft ausüben zu können.

Abtauchen eingeleitet
Das dritte Problem lag darin, daß das Boot nicht genügend Fahrt aufnehmen konnte. Zum einen waren sicherlich die relativ großen Auspuffrohre schuld, die eine Wassersäule von mehreren kg zusätzlichen Gewichtes erzeugten und so das Boot hinten herunterdrückten. Die Rohre mußten also unbedingt durch kleinere ersetzt werden. Wir verwendeten 10-mm-Alurohre (innen 9 mm Ø), die von hinten in die PVC-Rohre eingeschoben wurden und mittels passend ausgesägter Holzscheiben am PVC-Rohrende zentrisch gehalten wurden. Der Winkel wurde auf ca. 25° verkleinert, das Alu-Rohr mit 2K-Kleber fixiert und anschließend mit PU-Schaum eingeschäumt. Der überstehende PU-Schaum wurde nach Aushärtung weggeschnitten, das Alu-Rohr plangeschliffen und der Bootsunterboden erneut mit 2K-Autospachtel verspachtelt und verschliffen. Um das Boot bei Fahrt hinten etwas anzuheben, haben wir an der Spiegelunterkante ein Trimmbrett in Form einer 5-mm × 15-mm-Kiefernleiste angebracht. Das Trimmbrett ist ca. 8° nach unten geneigt, fest angebaut und reicht fast über die gesamte Spiegelunterkante. Der Übergang ist sauber verspachtelt und verschliffen.
Das vierte Problem war die nicht funktionierende Wasserkühlung. Der Fahrwasserdruck reichte offensichtlich nicht aus. Wenn man aber den Wassereinlauf hinter die Antriebsschraube setzt, dann kommt der Wasserdruck, den die Antriebsschraube erzeugt, unterstützend hinzu. Der vordere Wassereinlauf wurde abgesägt und dichtgemacht. Hinter der Antriebsschraube haben wir ein neues Einlaufrohr installiert und wieder die entsprechenden Schlauchverbindungen hergestellt.
Den schlechten Geradeauslauf des Bootes sollte ein unten angebrachtes Kielbrett mit 5 mm × 15 mm verbessern.
Das fünfte Problem war die beim Probelauf beschlagene Glaskuppel. Zunächst wurde eine Art Steuerstand für unsere Skeletor-Figur gebaut. Da die Figur nicht komplett unterzubringen war (unter der Glaskuppel befindet sich der Antriebsmotor), wurde sie in Hüfthöhe abgesägt und im Steuerstand befestigt. Damit dieser kleine Schönheitsfehler nicht auffällt, ist der Boden des Steuerstandes mattschwarz gestrichen. Hinten am Steuerstand ist nun ein kleiner Lüftermotor installiert, der die Luft unter der Glaskuppel kräftig umwälzt. Der Lüftermotor wird mit 6 V betrieben und ist über die Fernsteuerung einzuschalten.
So ausgerüstet konnten wir Mitte Januar den nächsten Testlauf starten. Das Boot lief jetzt gut geradeaus und lag dabei auch waagerecht im Wasser. Aus den beiden Auspuffrohren trat gut Wasser aus und auch aus dem Kühlwasseraustritt kam jetzt Wasser. Die Geschwindigkeit war allerdings immer noch nicht befriedigend. Wir hatten eine Welle samt einstellbarer 3-Blattschraube eingebaut. Die 3-Blattschraube hatte einen Außendurchmesser von 60 mm und konnte von Hand in der Steigung verändert werden. Wir haben dann kräftig damit herumexperimentiert, aber so richtig wollte das Boot damit nicht laufen. Die Glaskuppel beschlug jetzt nur noch an der linken und rechten unteren Hälfte, aber das würde sich im Sommer bei nicht so extremen Temperaturverhältnissen sicher bessern. Versuche, das Boot zum Abtauchen zu bewegen, schlugen allerdings auch diesmal fehl. Das Tiefenruder funktionierte zwar, aber bei langsamer Geschwindigkeit kam das Boot vorn zu weit aus dem Wasser so daß das Tiefenruder nicht genügend ins Wasser eintauchen konnte. Schlicht gesagt, es war einfach zu kurz geraten. Wir haben dann die Testfahrt nach ca. 20 Minuten abgebrochen. Alles in allem waren unsere bisherigen Maßnahmen erfolgreich, und die Betriebssicherheit hatte sich wesentlich verbessert. Fahrtregler und Motor waren nur handwarm, und auch das Umschaltrelais zeigte keinerlei Störungen. Antriebsgeräusche sind überhaupt keine vorhanden, bis auf den kleinen Lüftermotor, den wir im Stand deutlich hören konnten.
Es folgte wieder eine Woche mit Umbauarbeiten. Der Lüftermotor wurde elastisch angebracht, um so möglichst wenig Körperschall übertragen zu können. Die Fahrspannung haben wir durch einen zusätzlichen Akku von 24 V auf 30 V erhöht. Ein neues, längeres Tiefenruder entstand aus Alublech. Die 3-Blattschraube wurde entfernt und durch eine 55-mm-Rennschraube mit 0,85er Steigung ersetzt.
Da die 30-V-Akkus mit einem normalen Ladegerät nicht mehr zu laden waren, war ein Umschalter zu installieren, der die Akkus zum Laden auf 1 × 12V/8Ah und 1 × 6V/4Ah umschaltet. Das eingebaute 1-kg-Bleistück wurde entfernt, warum unnötig Gewicht mit herumschleppen; der Schwerpunkt wanderte durch diese Maßnahme zwar nach hinten, aber ob sich das störend auswirken würde, sollte die nächste Testfahrt zeigen.
Wir hatten unseren Modellmaßstab auf 1:9 festgelegt, das ergab sich aus der Größe der Figur des Skeletor. Als Rennboot im Maßstab 1:1 sollte die Geschwindigkeit etwa 70 km/h betragen. Für unser Modell hieß das, das Boot sollte 23,3 km/h Modellgeschwindigkeit erreichen (70 km/h:√9). Wie wir bei den bisherigen Fahrversuchen feststellen mußten, waren wir von dieser Modellgeschwindigkeit noch weit entfernt. Ende Januar ließ das Wetter dann einen erneuten Test zu. Es überraschte uns nun doch, wie das Boot loszog und aus den beiden Auspuffrohren das Wasser ausströmte. Kurven konnten sehr eng genommen werden, allerdings saugte die Schraube bei sehr engen Kurven Luft an, und das Boot verlor sofort an Geschwindigkeit. Wir waren nicht darauf vorbereitet, Geschwindigkeitsmessungen vorzunehmen, aber wir schätzten sie mit etwa 15 km/h ab. Das Fahrverhalten war dabei vorbildlich, genauso hatten wir uns die Sache vorgestellt.

beim Abtauchen . . .
Dann kam der spannende Augenblick: Taucht das Ding nun endlich oder nicht? Es tauchte, allerdings nur mit etwas Fingerspitzengefühl: Das Tiefenruder auf Vollausschlag stellen (ca. 30°), mit kleinster Fahrtstufe anfahren, warten, bis das Wasser das Deck überschwemmt hat, weiter langsam beschleunigen, das Boot taucht dabei im Winkel von ca. 5-10° ab, die beiden Auspuffrohre sind nur noch knapp an der Oberfläche, Tiefenruder auf Null stellen und gleichzeitig Stoff (full speed) geben, dann schießt das Boot wie gewünscht aus dem Wasser und nimmt zusehends Fahrt auf. Bei full speed kann, falls das Tiefenruder bedient wird, auch nichts passieren, da das Boot vorn zu hoch aus dem Wasser gedrückt wird, so daß das Tiefenruder nicht bis an die Wasseroberfläche heranreichen kann. Es muß erst die Geschwindigkeit zurückgenommen werden, bevor das Tiefenruder wieder greifen kann. Wird während des Abtauchvorgangs zuviel Stoff gegeben und das Tiefenruder zu spät auf Null gestellt, verschwindet das Boot vollkommen, und man weiß nicht, was es dann macht. In diesem Fall haben wir den Notausschalter betätigt und waren oft ganz überrascht, an welcher Stelle das Boot, achtern voraus pendelnd, wieder aufgetaucht ist.

. . . und vollständig untergetaucht.
Die Fahrzeit mit gut 20 min. hätte zwar länger sein können, aber bis hier waren wir mit dem Fahrverhalten zufrieden. Allerdings interessierte uns schon, was das Boot unter Wasser eigentlich macht, es sollte ja konstruktiv mit zunehmender Geschwindigkeit wieder auftauchen. Außerdem mußten unbedingt noch Geschwindigkeitsmessungen durchgeführt werden. Fahrtreglerleistungsteil und Motor waren wiederum nur handwarm. Vielleicht konnte man ja noch die Akkuspannung auf 36 V erhöhen und so etwas mehr Leistung aus dem Motor herauskitzeln. Wir wollten außerdem noch durch Probieren mit verschiedenen Antriebsschrauben die Sache optimieren. An der äußeren Form und an den Steuerteilen sollte nichts mehr verändert werden.
Das Boot konnte nun endgültig lackiert werden, die Grundfarbe ist ein leuchtendes Rot und als Kontrastfarbe wählten wir Weiß. Diese beiden Farben sind auch unter Wasser gut zu erkennen. Im Endausbau wog das Boot dann 10,2 kg. Ein weiterer Akku war installiert, die Fahrspannung betrug jetzt also 36 V. Die erhoffte Geschwindigkeit wurde auch erreicht und betrug gestoppte 23,5 km/h. Versuche mit anderen Antriebsschrauben ergaben keine Verbesserung, per Zufall hatten wir also die richtige Antriebsschraube mit 55 mm Ø und 0,85er Steigung ziemlich früh gefunden. Das Fahrverhalten beim Abtauchen konnte durch den zusätzlich eingebauten Akku verbessert werden, da der Schwerpunkt weiter nach hinten rutschte und dadurch nicht mehr so viel Restauftriebskraft vorhanden war. Das Boot taucht nun in einem flacheren Winkel ab, wir schätzen etwa 5° bis 8°. Die unten angeschrägte Form kann so besser bei einer Geschwindigkeitserhöhung wirksam werden. Das Boot taucht nicht zu tief durch, sondern kann im flachen Bogen die Wasseroberfläche durchstoßen. lm Schwimmbad haben wir dann ermittelt, welche Durchtauchtiefe erreicht wird. Wenn die Auspuffrohre gerade unter Wasser verschwunden sind, das Tiefenruder dann auf 0 gelegt und voll Stoff gegeben wird, so taucht das Boot ca. 1 m tief durch, bevor es in den Bogen nach oben umgelenkt wird. Hält man das Tiefenruder länger auf abwärts, läßt sich jeder beliebige Bogen steuern. Allerdings sollte das nicht übertrieben werden, sonst steckt das Modell im Grund!
Übrigens noch ein Wort zu unserer Antenne. Sie besteht aus einem 1-mm-Federstahldraht, der gegen Wasser voll isoliert wurde und so ein Steuern des Modells auch auf längere Entfernungen unter Wasser ermöglicht.
Schlußbemerkungen
Wir haben die Probeläufe und die daraus resultierenden Änderungen und Verbesserungen absichtlich etwas detaillierter beschrieben, da eine Neukonstruktion immer ihre Kinderkrankheiten erst überwinden muß. Das ist in der Industrie nicht anders als im Modellbau.
Man sollte auch keine Hemmungen haben, erkannte Fehler zu beseitigen. Das mag besonders bei fertigen Modellen schmerzlich sein, aber man hat nach einem erfolgreichen Umbau mit Sicherheit mehr Freude an dem Modell. Besonders wichtig erscheint uns dabei, daß nicht zu viele Schritte auf einmal gemacht werden. Besser ist es, schrittweise vorzugehen und nach jeder Verbesserung erst wieder einen Test durchzuführen, um kritisch die Auswirkungen auf das Modell zu beobachten. Es gibt ja oft mehrere Möglichkeiten, ein Problem zu lösen, und manchmal sind auch die simpelsten Lösungen die besten. In diesem Sinne wünschen wir allen Modellbauern stets gutes Gelingen, und vielleicht versucht der eine oder andere auch mal eine Eigenkonstruktion. Wer bereits ein oder zwei größere Baukasten-Modelle gebaut hat, ist nach unseren Erfahrungen dazu durchaus in der Lage.
Die spontane Bemerkung eines Zuschauers bei den Testfahrten wollen wir Ihnen zum Schluß nicht vorenthalten. Er sagte, es fehlt eigentlich nur noch, daß das Boot auch fliegen kann. Einen Moment lang waren wir über diese Aussage verblüfft. Aber warum eigentlich nicht? Dabei wissen wir durchaus, wovon wir reden, schließlich haben wir schon einmal ein Flugmodell nach dem dritten Looping im Boden "versenkt". Aber vielleicht ist es doch besser erst einmal mit den Flugmodellbau-Kollegen zu reden, bevor die nächste Science-Fiction-Story Realität wird.